- polski
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Jak wybrać rezystor shunt dla dokładnego pomiaru prądu
Katalog

Wybór wartości rezystancji shunt
Wybór wartości rezystora shunt ustala tonu dla tego, jak łańcuch pomiaru prądu zachowuje się w rzeczywistym produkcie, a nie tylko w arkuszu kalkulacyjnym. Jeden wybór dotyczy trzech rzeczy jednocześnie:
• całkowitego napięcia pomiarowego, z którym można pracować
• ciepła, które wygeneruje rezystor
• dodatkowego spadku napięcia, który odczuje obciążenie.
W praktyce często sprowadza się to do tego, jak komfortowa ma być margines sygnału w porównaniu do tego, ile strat i zapasu jesteś w stanie zaakceptować.
Wiele zespołów przyciąga dążenie do jak najmniejszych wartości R dla efektywności; ten instynkt jest zrozumiały. Problem w tym, że niskie napięcie shunt często prowadzi do małych, nudnych efektów nieidealnych w długich sesjach debugowania.
Zacznij od wyboru napięcia shunt przy maksymalnym prądzie, które twój wzmacniacz i ADC mogą uchwycić z zapasem w tolerancji, temperaturze i szumie. Powszechnie stosowane okno pełnoskalowe wynosi około:
• 50–100 mV
podczas gdy projekty o dużej mocy lub z małymi tolerancjami często zbliżają się do:
• 10–30 mV
aby zredukować straty i chronić napięcie obciążenia.
To, co zazwyczaj decyduje o tym, czy cel wydaje się "komfortowy", nie jest liczbą same w sobie, ale tym, jak daleko znajduje się powyżej błędów, które faktycznie zobaczysz na stole.
Napięcie shunt, które wydaje się w porządku w nominalnym obliczeniu, może wydawać się niewygodnie małe, gdy w przypadku najgorszych skutków pojawią się:
• przesunięcie
• dryft
• gradienty cieplne
• kwantyzacja
• zakłócenia
Jeśli kiedykolwiek obserwowałeś odczyt prądu zerowego w trakcie skanowania cieplnego, emocjonalna krzywa jest znajoma:
• ufność w temperaturze pokojowej
• następnie narastające wątpliwości
• następnie późnonocna próba naprawy go w oprogramowaniu układowym.
Przesunięcie wejściowe i dryft mogą pochłonąć zaskakującą część małego sygnału shunt. Gdy projekt zbytnio dąży do bardzo niskiego VSHUNT, zespoły często zauważają, że wartość bez obciążenia odmawia pozostania blisko zera w różnych temperaturach, i są zmuszone do:
• zwiększenia liczby kroków kalibracji
• większej logiki kompensacyjnej
• lub obu.
Przejścia miedzi na stop mogą generować napięcia termoelectriczne na poziomie mikrovoltów w obecności gradientów temperaturowych. Łatwo to zlekceważyć jako zbyt małe, by miało znaczenie, dopóki shunt nie znajduje się w pobliżu:
• gorącego induktora
• rozpraszacza ciepła MOSFET
• granicy przepływu powietrza, gdzie gradienty występują rutynowo.
Jeśli ADC (w tym jego szum) produkuje tylko niewielką liczbę skutecznych zliczeń w całym zakresie roboczym, wyjście zazwyczaj wygląda skokowo, a pętle kontrolne mogą zaczynać zachowywać się nerwowo przy małym obciążeniu. Projekt, który działa grzecznie przy nominalnym prądzie, może nadal wykazywać wahania spowodowane kwantyzacją, gdy sygnał zmniejsza się.
Małe napięcia shunt są łatwiejsze do zanieczyszczenia przez:
• sprzężenie węzła przełączania
• bouncowanie masy
• pickup magnetyczny
• parazyty związane z układem.
Gdy etapy zasilania przełączają się w pobliżu, prace związane z układem i filtracją tendencją wzrastają szybko, gdy VSHUNT jest zmniejszane.
Praktyczne podejście polega na ustawieniu maksymalnej wartości VSHUNT w taki sposób, aby pozostawała wygodnie powyżej połączonego najgorszego przypadku offsetu i szumów w szerokości pasma pomiarowego, którym rzeczywiście się interesujesz. Gdy sygnał jest zbyt mały, zespoły często spędzają dni na ściganiu:
• regulacji układu
• eksperymentów filtracyjnych
które nigdy nie wydają się w pełni satysfakcjonujące.
Po ustaleniu celu maksymalnego napięcia shunt, oblicz bezpośrednio oporność pierwszego podejścia:
Przykład (50 mV przy 5 A):
R = 0.05 / 5 = 0.01 Ω
Traktuj to jako punkt początkowy. Po tym punkcie wartość zazwyczaj jest korygowana przez:
• zachowanie termiczne
• ograniczenia przestrzeni
• dostępność opakowań
• to, czego nauczy cię prototyp.
Po wybraniu R oblicz rozpraszanie shunt przy maksymalnym prądzie:
Przykład:
PSHUNT = 52 × 0.01
PSHUNT = 25 × 0.01
PSHUNT = 0.25 W
Pomocne jest myślenie o PSHUNT jako o wejściu do projektowania termicznego, a nie jako o szybkim ptaszkowaniu w karcie katalogowej. Nawet gdy moc opornika wydaje się hojna, rzeczywiste zespoły mogą działać cieplej z powodu:
• ograniczonego obszaru miedzi
• ciepła od sąsiednich komponentów
• ograniczeń obudowy
• słabego przepływu powietrza.
Podczas uruchamiania dość powszechne jest obserwowanie dryfowania wskazań po kilku minutach, gdy shunt i otaczająca miedź się nagrzewają, co przesuwa oporność i ciągnie mierzony prąd ze sobą, doświadczenie, które może być bardziej irytujące, niż się wydaje, gdy próbujesz zamknąć problem stabilności pętli kontrolnej.
Dla dokładności pomiaru prądu, tolerancja shunt oraz współczynnik temperaturowy oporności (TCR) często pojawiają się bezpośrednio w budżecie błędów, tuż obok:
• ograniczeń wzmacniacza
• ograniczeń ADC.
Shunt 1% zaczyna od około 1% błędu wzmocnienia przed:
• offsetem wzmacniacza
• błędem zysku ADC
• dryftem referencyjnym
pojawiającym się w obrazie. Jeśli celem jest ścisła dokładność, typowe ścieżki obejmują:
• użycie shunt o węższej tolerancji
• kalibrację w produkcji
• połączenie obu.
Samonagrzewanie podnosi shunt powyżej temperatury otoczenia, a oporność zmienia się wraz z tym wzrostem temperatury. W ciągłej pracy wysokoprądowej, ten dryf może dominować w tym, co widzisz w terenie. Gdy wzrost temperatury jest niepewny, często jest mniej stresujące założyć większy wzrost niż przewiduje idealny model, a następnie zweryfikować za pomocą wczesnych pomiarów sprzętu (w tym nasycenie stanu ustalonego).
Zwiększenie VSHUNT generalnie poprawia margines pomiarowy przez:
• poluzowanie nacisku offsetu/szumów na froncie
• zwiększenie stosunku sygnału do szumu
podczas:
• zmniejszania efektywności
• kradzenia napięcia obciążenia.
Zmniejszenie VSHUNT robi odwrotność i zazwyczaj zwiększa obciążenie na:
• analogowym froncie
• dyscyplinie układu
• cyfrowym filtrowaniu.
| Czynnik |
Wyższe VSHUNT |
Niższe VSHUNT |
| Margines sygnału |
Lepszy |
Niższy |
| Efektywność |
Niższy |
Wyższy |
| Spadek napięcia |
Wyższy |
Niższy |
| Wymagania ADC |
Mniej wymagające |
Bardziej wymagające |
| Czułość na szum |
Niższa |
Wyższa |
| Rozpraszanie mocy |
Wyższe |
Niższe |
Wzór, który pojawia się w projektach, które wydają się spokojne do debugowania, polega na unikaniu absolutnego minimum V_SHUNT, chyba że efektywność dominuje cele systemowe. Wydanie trochę przestrzeni dla marginesu pomiarowego często zwraca się w postaci:
• mniejszych fałszywych wyzwalaczy ochronnych
• bardziej stabilnego zachowania kontrolnego
• mniej czasu spędzonego na zastanawianiu się, czy dziwne odczyty to fizyka, czy artefakt układu.
Gdy R spada do zakresu miliomów, niezamierzona oporność szeregowa w:
• ścieżkach
• via
• złącza
• połączenia lutowane
zaczyna konkurować z samym shuntem. W tym momencie dodatkowe 1–5 mΩ z trasowania i połączeń może stanowić dużą część zamierzonej wartości, a mierzony prąd może się różnić w zależności od:
• zmienności montażu
• starzenia się złączy
• przeróbek.
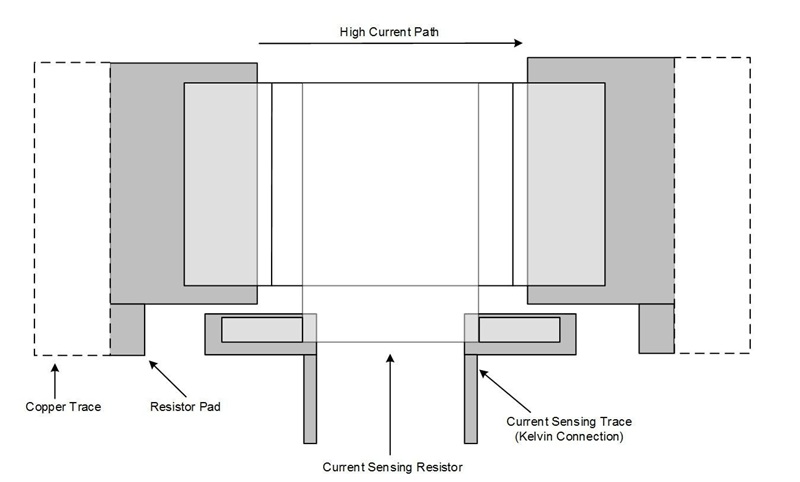
Dla shunt o niskiej wartości, czteropunktowe połączenia z starannym trasowaniem zapobiegają błędnemu odczytywaniu spadków napięcia miedzi podczas ładowania jako napięcia shunt. Bez pomiaru Kelvina, błąd zazwyczaj zależy od prądu i jest frustrująco niespójny w różnych wersjach.
Jeśli cel obejmuje szybkie przechwytywanie transientów, intensywne filtrowanie może ukryć zdarzenia, które próbujesz zmierzyć; jeśli filtrowanie jest zbyt lekkie, oscylacje przełączania mogą dominować odczyt. Wybór oporu współdziała z filtrowaniem, ponieważ ustala amplitudę sygnału w odniesieniu do:
• oscylacji
• odbioru
• szumów ADC.
Ustrukturyzowana kontrola czułości może dostarczyć wiele z tego, czego ludzie mają nadzieję, że symulacja dostarczy, z mniejszą liczbą ukrytych założeń i bardziej użytecznymi danymi liczbowymi.
Dla każdego kandydata R oblicz:
• VSHUNT przy IMAX
• PSHUNT przy IMAX
• szacowany wzrost temperatury (pakiet + obszar miedzi + założenia dotyczące przepływu powietrza)
• oczekiwane czynniki błędu (offset, dryft, kwantyzacja ADC i szum).
Pragmatyczne podejście polega na wyborze najmniejszego oporu, który nadal zapewnia stabilny odczyt w różnych warunkach temperatury i hałasu roboczego, w tym zachowanie przy małym obciążeniu. Tendencja ta prowadzi do równowagi między wydajnością a pewnością pomiaru i zmniejsza prawdopodobieństwo późnego zaskoczenia, gdy dokładność wygląda dobrze w zimnym stanie na stole, ale pogarsza się po rozgrzaniu lub gdy jednostka zostaje zamknięta w obudowie.
Straty mocy i projektowanie termalne
Oszacuj straty elektryczne w rzeczywistych scenariuszach operacyjnych
Opornik shunt kończy się przekształcaniem energii elektrycznej w ciepło w bardzo przewidywalny sposób, a ta przewidywalność jest uspokajająca, aż do momentu, gdy rzeczywiste tryby robocze zaczynają zachodzić na siebie. Zacznij od bazowego równania: P = I²R.
Przykład podstawowy: 5 A przez 0,01 Ω → P = 25 × 0,01 = 0,25 W.
Ta 0,25 W jest początkowym punktem odniesienia do dyskusji, nie punktem końcowym, ponieważ wzrost temperatury i długoterminowe zmiany oporu to zazwyczaj czynniki, które wywołują nieprzyjemne niespodzianki później w walidacji.
Użyj najwyższego ciągłego prądu, jaki produkt może realistycznie wytrzymać, a następnie zwiększ go z uwagi na codzienną rzeczywistość, która czasami wydaje się mniejsza: tolerancję, przesunięcia kalibracyjne, błędy pętli sterującej i zmiany zasilania.
Oceń również tryby robocze o dużym prądzie trwające dłużej, ponieważ powtarzające się obciążenia prądowe trwające kilka sekund mogą przyczynić się do ogrzewania w sposób przypominający ciągłą pracę, a nie krótkie zjawisko tranzytowe.
W wielu konstrukcjach surowa kombinacja nie jest pojedynczym elementem w specyfikacji; to duże obciążenie plus ciepłe powietrze w obudowie plus ograniczony przepływ powietrza plus sąsiadujące źródła ciepła.
Dla prądów pulsacyjnych, ciętych, dwukierunkowych lub regeneracyjnych, oblicz ogrzewanie z RMS prądu: P = IRMS²R.
Prąd szczytowy może wydawać się bardzo wysoki na wykresach pomiarowych, ale długoterminowe ogrzewanie jest głównie określane przez prąd RMS (IRMS) w czasie.
Powtarzający się wzór awarii pojawia się, gdy walidacja koncentruje się na limitach szczytowych, podczas gdy wysoka cykliczność cicho produkuje niemal ciągłe ogrzewanie.
Użyj najgorszej wartości oporu, gdy szacujesz górną granicę mocy. Zacznij od tolerancji, a następnie uwzględnij przesunięcie oporu spowodowane TCR shunta w miarę wzrostu jego temperatury.
Nawet gdy moc jest poniżej wartości znamionowej, samoogrzewanie może wciąż zniekształcać pomiar poprzez: (a) dryft oporu oraz (b) gradienty termiczne, które przenikają do trasowania czujników i zakończeń.
Konserwatywne założenie, które często oszczędza czas, polega na tym, że ciało shunta działa goręcej, niż wskazuje pobliski czujnik na płytce, zwłaszcza gdy shunt znajduje się blisko innych ciepłych elementów.
Przetłumacz Watty na wzrost temperatury i stres materiałowy
Liczba mocy sama w sobie jest tylko częściową historią; ta sama dyspacja może być nudna na dużych obszarach miedzi i problematyczna w gęstym układzie wewnątrz zamkniętej skrzynki.
Praktyczne pytanie brzmi: jaką temperaturę osiągają element shunt i zakończenia w warunkach wysokiej temperatury otoczenia, słabego przepływu powietrza i pobliskich źródeł ciepła oraz jak powtarzalny jest ten wynik w różnych jednostkach?
Karty katalogowe zazwyczaj podają nominalną moc przy odniesieniu do temperatury otoczenia (często 70°C), a następnie ograniczają dopuszczalną moc powyżej tego punktu.
Sprawdź, gdzie rzeczywista „temperatura otoczenia” obudowy spada podczas pracy, ponieważ powietrze w obudowie rutynowo wznosi się znacznie powyżej temperatury pokojowej i może się znacznie różnić w zależności od umiejscowienia.
Pobliskie źródła ciepła, które należy uwzględnić, to: baterie;Induktory;MOCFET-y;prostowniki;gorące regulatory.
W przypadku shuntów montowanych powierzchniowo, miedź PCB często odprowadza większość ciepła. Wzrost temperatury może się znacznie różnić w zależności od obszaru miedzi, grubości miedzi, sprzężenia płaszczyzny i gęstości otworów termicznych.
Późne zmiany w trasowaniu, które ograniczają miedź dla wygody, mają zwyczaj wytwarzania gorących miejsc i dryftu, na które nikt nie miał nadziei przeznaczyć czasu w harmonogramie.
Proces pracy, który zwykle wydaje się spokojniejszy przy uruchamianiu, polega na zarezerwowaniu hojnej miedzi na początku i jej rozluźnieniu dopiero po zmierzeniu, że zachowanie termiczne pozostaje dobrze zachowane.
Pracowanie poniżej nominalnego poziomu mocy unika natychmiastowych uszkodzeń, ale nie gwarantuje stabilnego pomiaru. Wiele produktów degradacja powoli: opór wzrasta, kalibracja się zmienia, a progi ochrony wędrują.
Z perspektywy niezawodności wybór opornika często przebiega płynniej, gdy jest osadzony w kontekście utrzymania dokładności i zachowania dryfu, z mocą traktowaną jako jeden z czynników, a nie jako cała decyzja. To ustalenie zmniejsza frustrację związana z projektem, który przechodzi szybki test funkcjonalny, a później zmaga się w czasie namaczania, kontroli powtarzalności lub starzenia w terenie.
Zdefiniuj wolną przestrzeń z wyraźnym celem temperaturowym i dryfowym
Powszechną zasadą jest 2× ciągła moc wolnej przestrzeni, ale bardziej uzasadnione podejście wiąże wolną przestrzeń z dopuszczalnym wzrostem temperatury i dopuszczalnym dryfem.
Jeśli dokładność pomiaru żywotności jest celem projektowym, wybierz opornik tak, aby wzrost temperatury w stanie ustalonym pozostał umiarkowany przy maksymalnym obciążeniu, zamiast unosić się blisko stromej części krzywej deformacji.
Ten wybór zmniejsza również naprężenie połączeń lutowanych spowodowane cyklicznym nagrzewaniem, które jest jednym z tych problemów, które mogą wydawać się w porządku, aż nagle staną się pułapką przy debugowaniu na późniejszym etapie.
Dla przeciążeń i krótkich zdarzeń korzystaj z myślenia o energii i cyklach termicznych
Krótkie impulsy mogą przekroczyć stałą ocenę bez natychmiastowej awarii, a mimo to pozostawić po sobie trwałą zmianę oporu.
W przypadku rozruchu silnika, prądów zwarciowych lub błędów baterii, oceniaj stres impulsowy za pomocą energii: E = ∫ I²R dt.
Kiedy karty danych dostarczają wykresów impulsów/przeciążeń, używaj ich z rzeczywistą szerokością impulsu i cyklem pracy. Kiedy wykresy są nieobecne lub niejasne, traktuj powtarzające się impulsy jako scenariusz cyklu termicznego, a nie pojedynczy występ.
Opornik może tolerować pojedynczy impuls przeciążeniowy i nadal starzeć się pod powtarzającym się stresem. Powtórzenia mają tendencję do ujawniania się jako powolny dryf offsetu, przerywane pomiary spowodowane zmęczeniem lutów lub subtelne odbarwienie padów.
Przyspieszone testy cykliczne przeprowadzane wcześnie mogą usunąć wiele niepewności później, a często również emocjonalnie się zwracają, z mniejszą liczbą zagadek, które awariują tylko czasami podczas walidacji systemu.
Walidacja za pomocą testów termicznych pod dużym stresem i prostych kontrol zdrowotnych
Obliczenia zawężają kandydatów, a następnie walidacja na ławce ujawnia, co naprawdę robi obudowa, przepływ powietrza i układ. Pracuj przy maksymalnym realistycznym obciążeniu, aż temperatury się ustabilizują, powtórz w skrajnych temperaturach, a następnie porównaj oporność przed i po teście oraz stabilność pomiaru po schłodzeniu.
Śledź te wskaźniki zdrowia podczas i po testach:
• Dryf offsetu rosnący w czasie przy stałym prądzie.
• Połączenia lutowane działające zauważalnie cieplej niż ciało lub zakończenia opornika.
• Zbrązowienie płyty lub ciemnienie pozostałości topnika wokół padów.
• Przerywane pomiary podczas stukania, wibracji lub cykli termicznych.
Zachowania awaryjne, które ten proces ma na celu uniknięcie
Ryzyko przyspiesza, gdy opornik zbliża się do swojej maksymalnej temperatury, a podpis awarii zwykle wpada do kilku rozpoznawalnych kategorii:
• Dryf oporu, który bezpośrednio zamienia się w błąd pomiaru.
• Zmęczenie lutów i uszkodzenia padów spowodowane cyklami termicznymi, które powodują przerywane lub hałaśliwe pomiary.
• Przegrzewanie prowadzące do zdarzeń otwartych/zwarciowych, dezaktywujących funkcje ochronne lub wyzwalających wtórne uszkodzenia w innym miejscu.
Solidna analiza rozpraszania kończy się udokumentowanym marginesem w wzroście temperatury i zachowaniu dryfu, zamiast kończyć się na obliczeniu mocy.
Wybór materiału i strategia budowy oporników
Dokładność opornika zazwyczaj odnosi się do dwóch ogólnych tematów: jak zachowuje się opór w miarę nagrzewania się części oraz jak dobrze układ pomiarowy zapobiega przedostawaniu się parasytów do odczytu. W praktyce pomocne jest traktowanie opornika jako więcej niż symbol opornika w schemacie; zachowuje się jak mała struktura termiczna z interfejsami mechanicznymi i geometrią miedzi, która może cicho kierować liczbami.
Dominujące źródła błędu: wzrost temperatury; opór przyłączeniowy/kontaktowy; indukcyjność związaną z układem.
Kiedy zespół projektowy czuje się zaskoczony dryfu odczytu prądu, rzadko jest to dlatego, że prawo Ohma przestało działać. Częściej wynika to z tego, że wdrożenie termiczne i fizyczne dodało zachowań, które łatwo było zignorować podczas przeglądu schematu, a następnie trudno je zignorować na ławce.
Wybór materiału
Praktycznym celem wyboru jest niski współczynnik temperaturowy oporu (TCR). Stopy takie jak manganin i konstantan są powszechnie używane, ponieważ ich opór zmienia się tylko nieznacznie w miarę wzrostu temperatury. To zachowanie pasuje do rzeczywistości, że opornik ma na celu rozpraszanie mocy, czasami w sposób ciągły, a nawet umiarkowane waty mogą wystarczyć, aby znacznie zmienić temperaturę i zmienić odczyt.
Pomaga również zaplanować "samonagrzewanie" jako normalny tryb pracy, a nie wyjątek. Jeśli TCR stopu jest wyższe, oporność zmienia się podczas stałego obciążenia, a zmierzony prąd może wydawać się wędrować, nawet gdy prawdziwy prąd jest stabilny. Tego rodzaju powolny dryf może być szczególnie irytujący podczas walidacji, ponieważ wygląda na problemy z instrumentacją, dopóki historia cieplna nie stanie się oczywista.
Typowe błędne diagnozy dla wolnego dryfu prądu po zmianie obciążenia: szum ADC; przesunięcie wzmacniacza; błąd kalibracji.
W typowej konfiguracji na stole, rutynowo obserwuje się narastający prąd wyświetlany przez dziesiątki sekund po zmianie skoku, a następnie uspokaja się, gdy rezystor i jego miedź w końcu osiągną równowagę cieplną. Zobaczenie tego zachowania po raz pierwszy może sprawiać wrażenie problemu fantomowego, ale często znika, gdy wzrost temperatury i przepływ ciepła traktowane są jako podstawowe ograniczenia projektowe.
Nagrzewanie to nie tylko średni wzrost temperatury; gradienty w obrębie korpusu rezystora i jego końców mogą zakłócać powtarzalność. W kompaktowych płytkach jedna strona rezystora może odprowadzać ciepło do dużego wylewu miedzi lub być narażona na przepływ powietrza, podczas gdy druga strona pozostaje względnie gorąca. Ta nierównomierna dystrybucja temperatury może przełożyć się na subtelne zmiany w oporności oraz w lokalnych EMF i zachowaniach kontaktowych, które przewody pomiarowe starają się ignorować.
Aby wyniki wydawały się mniej kapryśne w różnych konstrukcjach, zazwyczaj warto rozpraszać ciepło w przewidywalny sposób:
• Zapewnić wystarczający przekrój miedzi do przenoszenia prądu i rozpraszania ciepła.
• Unikać detali montażowych (podstawki, zaciski, żebra obudowy), które schładzają jedną stronę bardziej niż drugą.
• Utrzymywać otoczenie cieplne wokół obu końców rezystora tak symetryczne, jak na to pozwala projekt mechaniczny.
Nawet stop o bardzo niskim TCR ma swoje ograniczenia. Jeśli punkt roboczy powoduje duże wahania temperatury, ponieważ rezystor jest za mały, przepływ powietrza jest nieregularny lub odprowadzanie ciepła jest słabe, pewien dryf i długie ustalanie po zmianach obciążenia to po prostu to, co produkuje fizyka. Projektowanie tak, aby rezystor działał "mniej gorąco niż mógłby", często przynosi spokojniejsze wyniki i mniej niepokojących sesji debugowania.
Budowa
Wybór dobrego stopu rzadko kończy pracę. Detale budowy i połączeń często dominują, ponieważ sygnał rezystora jest zazwyczaj w zakresie milivoltów, gdzie drobne parasyty zaczynają konkurować z mierzonymi wartościami.
W tym reżimie milivoltów, niewiele potrzeba, aby dodatkowa oporność szeregowa zaczęła mieć znaczenie: spoiny lutownicze, otwory w lotkach, styki złączek i zwężenia miedzi mogą dodać spadków, które wyglądają jak rzeczywiste napięcie rezystora, chyba że pomiar zostanie starannie zaaranżowany. To jest jeden z tych obszarów, w którym inżynierowie mogą czuć się pewnie patrząc na schemat, a potem czuć się mniej zadowoleni po montażu, ponieważ schemat pomija fizyczną ścieżkę prądu, którą tworzy PCB i złącza.
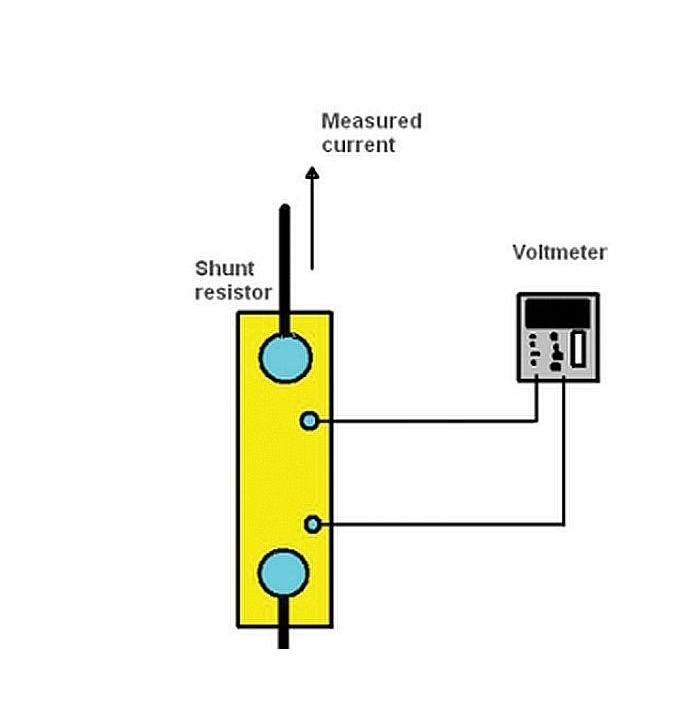
Rezystor czteropunktowy (Kelvin), lub przynajmniej stopka, która oddziela połączenia prądowe i pomiarowe, zazwyczaj daje bardziej wiarygodne wyniki niż pomiar dwupunktowy. Zamysł jest prosty: mierzyć napięcie bezpośrednio na samym elemencie oporowym, a nie na połączeniach i miedzi używanej do przenoszenia prądu obciążenia.
Przy dużym prądzie, nawet ułamki miliohmu w oporności szeregowej mogą tworzyć milivolty dodatkowego spadku. Kiedy ten dodatkowy spadek znajduje się w ścieżce pomiarowej, może się znaleźć w tym samym zakresie co zamierzony sygnał rezystora i zniekształcać wnioskowany prąd. Wiele projektów, które wyglądają dobrze na papierze, kończy z wysokimi wskazaniami lub dryfem, ponieważ fizyczna implementacja przypadkowo zawiera ukrytą oporność w obszarze pomiarowym.
Sensing Kelvin dostarcza tego, co obiecuje, tylko wtedy, gdy ścieżki pomiarowe przyłączają się do zamierzonych granic elektrycznych. Pady pomiarowe działają najlepiej, gdy pobierają napięcie bezpośrednio na brzegach elementu oporowego, a nie gdzieś wzdłuż miedzi o wysokim prądzie, która również przenosi prąd obciążenia i jego związany spadek IR.
Zwyczaje układu, które mają tendencję do redukcji nieprzyjemnych niespodzianek:
• Umieścić końcówki pomiarowe Kelvin blisko granic elementu oporowego.
• Kierować ścieżki pomiarowe jako zbliżoną parę różnicową.
• Trzymać parę pomiarową z dala od węzłów przełączających i hałaśliwych pętli zasilania.
• Zwracać parę pomiarową bezpośrednio do wejść wzmacniacza, nie dzieląc segmentów o wysokim prądzie.
Traktowanie pary pomiarowej jak sygnału pomiarowego, a nie tylko innej sieci, często prowadzi do stabilniejszych wskazań w całej produkcji, poprawkach i starzejących się złączach. Ta stabilność jest trudna do przecenienia podczas rozwiązywania problemów w późnej fazie, gdy presja czasowa sprawia, że każdy niejednoznaczny milivolt wydaje się osobisty.
Obciążenia dynamiczne: Indukcyjność jako cicha dodatkowa składowa napięciowa
W przypadku prądu dynamicznego, indukcyjność często staje się dominującym źródłem błędu pomiarowego. Mierzona napięcie na rezystorze szeregowo-połączeniowym nie jest czysto I × Rszeregowo-połączeniowy. Gdy prąd zmienia się szybko, pojawia się składnik indukcyjny, Vindukcyjny = L(di/dt), który dodaje się do lub odejmuje od spadku rezystancyjnego. W szybkoodcinających elektronicznych zasilaczach, wkład indukcyjny może przewyższać wkład rezystancyjny podczas przełączania, co może sprawić, że odczyty chwilowe wyglądają na błędne, nawet gdy obwód pomiarowy działa dokładnie tak, jak został zbudowany.
Jedna z konsekwencji, która zaskakuje zespoły: układ szeregowo-połączeniowy może wydawać się dokładny przy DC, a następnie wydawać się niedokładny w środowisku PWM. W wielu przypadkach obwód po prostu przekazuje fizykę ścieżki prądu, w tym jej parasytarną indukcyjność, zamiast popełniać błąd w obliczeniu.
Rezystory szeregowo-połączeniowe o niskiej indukcyjności zmniejszają pole pętli dzięki szerokim, płaskim ścieżkom prądowym i symetrycznej geometrii. Ta konstrukcja zmniejsza indukcyjność parasytarną i obniża magnitudę artefaktów di/dt. W praktycznych realizacjach kilka wyborów geometrycznych konsekwentnie przesuwa wskaźnik w kierunku powtarzalności:
• Symetryczne wprowadzanie i wyprowadzanie prądu wokół elementu rezystancyjnego.
• Krótkie, bezpośrednie ścieżki prądowe z minimalnym polem pętli.
• Szerokie sekcje przewodników, które unikają wąskich zwężeń w pobliżu rezystora szeregowo-połączeniowego.
Gdy krawędzie PWM są szybkie, te fizyczne wybory często mają większy wpływ na stabilność pomiarów niż drobne modyfikacje w nominalnej wartości oporu, co może wydawać się nieintuicyjne, dopóki po raz pierwszy zmiana układu nie naprawi problemu, który wyglądał jak problem z analogowym front-endem.
Kiedy (di/dt) jest wysokie, umieszczenie wzmacniacza sensorycznego blisko punktów Kelvin zmniejsza odbiór sygnału i unika powiększania obszaru pętli pomiarowej. Ścisłe trasowanie różnicowe pomaga z tego samego powodu. Filtrowanie staje się następnie świadomym wyborem, a nie pośpiesznym zamysłem, ponieważ krawędzie przełączania mogą aliasować do pasma pomiarowego i tworzyć odczyty, które wyglądają na hałaśliwe, skaczące lub mylące.
Opcje celów pomiarowych (wybierz wcześnie, ponieważ wpływa to na decyzje dotyczące układu i analogowe w różnych kierunkach): prąd średni do monitorowania mocy, ogranicz pasmo, aby krawędzie były tłumione, a wyświetlacz ustabilizowany; prąd szczytowy/przejściowy do ochrony, utrzymuj wyższe pasmo, podkreślając niską indukcyjność i ostrożny układ, aby zredukować fałszywe wyzwolenia.
W codziennych terminach inżynieryjnych, projekt wydaje się gładszy, gdy zespół wcześnie uzgadnia, czy chce elektronicznie szybkich informacji o prądzie, czy energetycznie dokładnych informacji o prądzie. Te dwa cele mogą być obie ważne, ale rzadko rozwijają się pod tą samą geometrią szeregowo-połączeniową, pasmem wzmacniacza i strategią filtracji.
Czynniki mechaniczne i bezpieczeństwa

Wykonanie mechaniczne decyduje o tym, czy teoretyczna wydajność utrzymuje się, gdy produkt staje w obliczu ciepła, wibracji, obsługi i czasu. Dokładność elektryczna może być optymalizowana w schematach i arkuszach kalkulacyjnych, jednak stabilność w rzeczywistych warunkach i bezpieczne zachowanie często są definiowane przez mechaniczne i termiczne realia, które czasami jest łatwo niedoszacować, dopóki prototyp nie zacznie "zachowywać się inaczej" na stanowisku.
Obsługa termiczna i błąd pomiarowy spowodowany ciepłem
Rezystory szeregowo-połączeniowe o wysokim prądzie przekształcają małe spadki napięcia w ciepło, a to ciepło potrzebuje powtarzalnej ścieżki do rozprzestrzenienia się i wyjścia z systemu. Niespójna ścieżka termiczna może powodować zmiany pomiarowe i dryf. Efekty te często stają się najbardziej zauważalne podczas zmian obciążenia, zmian temperatury obudowy i okresów rozgrzewania systemu.
Rezystor szeregowo-połączeniowy może wyglądać elektrycznie poprawnie w izolacji i nadal dryfować, gdy jest osadzony w zbyt małej lub niewygodnej strukturze miedzianej. W praktyce otaczająca miedź staje się częścią termalnego środowiska rezystora szeregowo-połączeniowego i częścią sieci rozkładu prądu.
Powszechnymi przyczynami nieoczekiwanego nagrzewania są zazwyczaj rzeczy prozaiczne, dlatego umykają one podczas przeglądów: pojedyncza zwężona część, wąskie miejsce w przelocie lub przejście warstwy, które koncentruje gęstość prądu.
Zalecane taktyki układu:
• Szerokie, grube nalewki miedziane na segmentach o dużym prądzie
• Krótkie, bezpośrednie ścieżki prądowe z minimalnymi zwężeniami
• Wiele przelotów dla przejść warstwowych, aby rozdzielić zarówno prąd, jak i ciepło
• Punkty zbierania sygnału umieszczone, aby unikać oporu parasytarnego w miedzi o dużym prądzie
Gdy płyty wracają z laboratorium z tajemniczym dryfem, często można to prześledzić do jednego przeoczonego zwężenia, które staje się prawdziwym źródłem ciepła, podnosząc temperaturę rezystora szeregowo-połączeniowego wystarczająco, aby zniekształcić odczyty podczas rzeczywistego obciążenia.
Jeśli przepływ powietrza jest przypadkowy, a nie zdefiniowany, temperatura rezystora szeregowo-połączeniowego może zmieniać się w zależności od orientacji obudowy, zmienności wentylatora lub tego, jak szczelnie kable są prowadzone w pobliżu płyty. Tego rodzaju zmienność może być frustrująca, ponieważ tworzy zachowanie kalibracyjne, które wydaje się zmienne w zależności od ustawienia, nawet gdy nic oczywistego nie zmieniło się elektrycznie.
Mały radiator, kontrolowany kanał przepływu powietrza lub celowa strategia kontaktu termicznego mogą sprawić, że profil temperatury będzie powtarzalny. Powtarzalność ma tendencję do bycia bardziej wartościową niż gonić za najniższą możliwą temperaturą, ponieważ kalibracja i zachowanie kontroli korzystają z konsekwencji.
Sytuacje, w których szczytowa temperatura ma większe znaczenie niż średnia:
• Napędy silników z dynamiką obciążenia PWM
• Pulsowanie elektromagnesów lub aktuatorów
• Wydarzenia rozruchowe i szybkie transjenty prądowe
• Obciążenia przemysłowe o cyklu pracy
Projektowanie wyłącznie w oparciu o stabilne parametry termiczne może prowadzić do niestabilności w czasie przejść cyklu pracy, co często jest momentem, gdy pętle kontrolne są najbardziej wrażliwe, a „prawie poprawne” pomiary stają się operacyjnie niewygodne.
Gradienty temperatury w obrębie różnych metali mogą powodować różnice na poziomie mikrovoltów, a te różnice przestają być akademickie, gdy interesujący sygnał wynosi zaledwie kilkadziesiąt miliwoltów. Symetria układu nie jest tutaj estetyczna; jest to metoda pomiarowa, która redukuje nierównowagę termiczną EMF.
Praktyczne nawyki symetrii:
• Prowadź ścieżki pomiarowe jako parę dopasowaną o podobnej długości i geometrii
• Utrzymuj masę miedzi i ekspozycję termiczną podobne na obu ścieżkach pomiarowych
• Unikaj umieszczania jednego przewodu pomiarowego w pobliżu lokalnych źródeł ciepła, podczas gdy drugi pozostaje w chłodniejszym obszarze
Źródła ciepła, które często zaburzają jedną stronę pary pomiarowej:
• MOSFET-y
• Induktory
• Prostowniki i diody
• Regulatorzy o dużym rozpraszaniu ciepła
Wzór, który wielokrotnie pojawia się podczas debugowania, to różnica, której nikt nie potrafi wyjaśnić, często korelująca z wzrostem temperatury płytki i zanikająca po ulepszeniu prowadzenia ścieżek pomiarowych i ekspozycji termicznej, aby były bardziej zrównoważone.
Tolerancja, stabilność i napięcie uciążliwe
Poczynkowa tolerancja wpływa na punkt wyjścia, ale długoterminowa dokładność jest często kształtowana przez to, jak oporność zmienia się wraz z temperaturą, gęstością mocy i ograniczeniami mechanicznymi, które subtelnie zmieniają profil termiczny w ciągu miesięcy lub lat. Shunt rzadko dryfuje w osamotnieniu; otaczająca struktura i szczegóły procesu często kierują wynikiem.
Shunt o wąskiej tolerancji może zmniejszyć początkowe rozprzestrzenienie zysku, ale zysk systemowy nadal odzwierciedla pełny łańcuch sygnałowy. Często obserwuje się, że różnice w produkcji są mniej napędzane nominalną wartością shuntu, a bardziej przez konsekwentne, niewielkie różnice montażowe, które się kumulują.
Wskaźniki błędu zysku na poziomie systemu:
• Offset wejścia wzmacniacza i prądy polaryzacyjne
• Dryf odniesienia ADC i zachowanie temperatury
• Oporność dodana przez prowadzenie ścieżek pomiarowych i połączenia
• Oporność kontaktu w złączach lub interfejsach magistrali
• Zmiany grubości miedzi i różnice w powłoce
• Objętość lutowia i geometria filletów wokół zakończeń
Projektowanie footprintu i umiejscowienie zbierania pomiarów mogą być dostosowane w celu zmniejszenia wrażliwości na fillet lutowniczy i geometrię kontaktu. Takie podejście często przynosi bardziej przewidywalne zachowanie z partii na partię niż po prostu określenie węższej tolerancji nominalnej shuntu i liczenie na idealne zachowanie pozostałej części stosu.
Niski TCR ogranicza ruch oporu wraz z temperaturą, a niski współczynnik mocy redukuje ruch oporu przy zastosowanej gęstości mocy. Niewygodna część polega na tym, że samozagrzewanie ma kształt obciążenia, a nie jest stałe, więc dryf może stać się zależny od obciążenia, skutecznie stanowiąc cichą nieliniowość, której algorytmy kontrolne mogą nie przewidywać.
Warunki, które często ujawniają dryf zależny od obciążenia:
• Praca w szerokim zakresie dynamicznym
• Powtarzające się obciążenia pulsacyjne
• Kontrola w pętli zamkniętej, która zakłada liniową sprzężenie prądowe
Trwałą strategią jest traktowanie shuntu jako termicznie aktywnego i zmniejszenie wzrostu temperatury na amper używając rozprzestrzeniania miedzi, przewidywalnego przepływu powietrza i zdyscyplinowanego rozmieszczenia komponentów, zamiast polegać tylko na poprawie w karcie danych, która może nie mieć przełożenia, gdy kontekst termiczny na poziomie płytki staje się dominujący.
Nawet jeśli spadek shuntu jest mały, element i jego końcówki mogą znajdować się na wysokim potencjale wspólnego trybu. Oznacza to, że limity napięcia roboczego, działanie systemu izolacji i przebicia/odległości na poziomie płytki muszą być oceniane na poziomie systemu, a nie wywnioskowane z pomiaru w milivoltach.
Kontrole projektowe do przeprowadzenia:
• Maksymalne napięcie robocze na elemencie i systemie izolacji opakowania
• Przebiegi i odległości zgodnie z odpowiednią normą i stopniem zanieczyszczenia
• Czystość płyty i resztki, które mogą zmniejszyć efektywną odległością
• Fizyczne rozmieszczenie w stosunku do źródeł zanieczyszczeń i ścieżek przewodzących pozostałości
Czynniki zanieczyszczające, które mają tendencję do zaskakiwania zespoły później:
• Nagromadzenie kurzu w ścieżkach przepływu powietrza
• Kondensacja podczas przechowywania lub transportu
• Resztki topnika i nierównomierne pokrycie czyszczeniem
Gdy awarie wycieków wydają się losowe w terenie, rzeczywistą przyczyną jest często przewidywalna kombinacja umiejscowienia, pozostałości i środowiska, która staje się oczywista dopiero po skorelowaniu zwrotów z danymi dotyczącymi procesu produkcji.
Trwałość pod rzeczywistym obciążeniem mechanicznym
Shunty są często stosowane tam, gdzie współistnieje ciepło, wibracje i powtarzające się cykle zasilania. Rozsądnie jest założyć, że montaż będzie narażony na zginanie, wstrząsy i niedopasowanie rozszerzenia cieplnego, nawet jeśli produkt jest reklamowany jako stacjonarny, ponieważ transport, instalacja i konserwacja wciąż narzucają wydarzenia mechaniczne.
Wykończenie zakończenia i powłoki ochronne powinny odpowiadać przewidywanej atmosferze. Korozja nie zawsze kończy się dramatycznie; może cicho wprowadzać zmiany na poziomie miliomów, które prowadzą do przesunięcia kalibracji w czasie, co może być głęboko irytujące, ponieważ filtracja oprogramowania układowego może sprawić, że dryf stanie się mniej oczywisty, nie usuwając faktycznie błędu.
Środowiska, które przyspieszają mechanizmy korozji:
• Opary przemysłowe i narażenie na substancje chemiczne
• Sól drogowa i nadmorska mgła solna
• Wysoka wilgotność i częste cykle kondensacji
Duże shunty mogą zachowywać się jak sztywne kotwice. Podczas cykli cieplnych ta sztywność może obciążać złącza lutownicze, zwłaszcza w pobliżu krawędzi płytki, punktów wkrętów lub obszarów, które zginają się podczas montażu. Awarie często występują tam, gdzie masa i wibracje się spotykają, a niekoniecznie tam, gdzie gęstość prądu jest najwyższa.
Miary niezawodności mechanicznej:
• Dodaj wsparcie mechaniczne tam, gdzie pasuje do koncepcji montażu
• Przestrzegaj zalecanego wzoru terenowego, aby kontrolować obszar nawilżania i kształt filletu
• Unikaj rozciągania obszarów PCB, które zginają się podczas instalacji lub dokręcania
• Trzymaj elementy o dużej masie z dala od znanych punktów zginania, gdy istnieje swoboda układu
Zwroty z terenu często potwierdzają prostą rzeczywistość: pęknięcia mają tendencję do powstawania w miejscach, gdzie koncentruje się stres, a stres koncentruje się tam, gdzie sztywność zmienia się nagle.
W trudnych warunkach selekcja komponentów korzysta z danych dotyczących cykli i wibracji, które odzwierciedlają rzeczywiste metody kwalifikacji. Środki takie jak stakowanie lub wypełnienie pod spodem mogą pomóc w niektórych konstrukcjach, ale mogą również tworzyć nowe problemy termiczne lub stresowe, jeśli zastosowane bez potwierdzenia skutków ubocznych.
Podejścia, które są często oceniane razem:
• Komponenty z potwierdzonymi danymi dotyczącymi cykli termicznych i wibracji
• Wypełnienie pod spodem lub stakowanie po potwierdzeniu, że ciepło nie jest uwięzione
• Ograniczenia mechaniczne, które unikają tworzenia nowych wzrostów stresu
Szczegóły planowania testów, które redukują fałszywe zaufanie:
• Cykl temperaturowy z obciążeniem zasilania, a nie tylko cykl bez zasilania
• Pomiar dryfu podczas przejść cyklu pracy
• Inspekcja w celu wykrycia wytapiania lutowia i mikro-pęknięć po cyklach
Testy termiczne bez zasilania mogą wyglądać na czyste, podczas gdy pomijają dryf związany z współczynnikiem mocy i mechaniczne efekty w kształcie obciążenia, które pojawiają się tylko, gdy prąd naprawdę przepływa.
Bezpieczeństwo, zgodność i zachowanie awaryjne
Bezpieczeństwo kształtowane jest przez to, co system robi, gdy coś idzie źle, a nie tylko przez wydrukowaną ocenę komponentu. Łańcuch sensora prądu, który zachowuje się przewidywalnie w warunkach awarii, ma tendencję do produkowania spokojniejszych wyników w terenie i jaśniejszych diagnostyk w trakcie serwisowania.
Części z uznawanymi certyfikacjami bezpieczeństwa mogą zmniejszyć niepewność związana z zgodnością i zazwyczaj poprawić możliwość śledzenia. Jednakże, certyfikacja nie jest skrótem do weryfikacji systemu, ponieważ przeciąg, odstępy i warunki cieplne są właściwościami złożonego produktu i jego wyborów układu.
Przedmioty dotyczące zgodności i weryfikacji, które pozostają w gestii systemu:
• Przeciąg i odstępy na poziomie płytki
• Wzrost temperatury w rzeczywistym obudowie i warunkach przepływu powietrza
• Odstępy wokół zanieczyszczeń i pozostałości
• Kontrola produkcji, która zachowuje założoną czystość i odstępy
Załóż, że shunt może zawieść otwarcie, dryfować w górę lub rozwinąć przerywane połączenia. W pętli kontrolnej otwarty shunt może być błędnie odczytany jako brak prądu, co może spowodować, że system zażąda większego napędu i stworzy zachowanie wymykające się spod kontroli.
Zachowania awaryjne, na które warto się przygotować:
• Shunt obwodu otwartego lub podnoszone zakończenie
• Stopniowy dryf oporności, który zaburza odczyty prądu
• Przerywane połączenie podczas wibracji lub rozszerzenia termicznego
• Uszkodzenia przewodu pomiarowego lub anomalie wejścia ADC
Wzory wykrywania i łagodzenia, powszechnie stosowane:
• Kontrole prawdopodobieństwa porównujące polecenie vs. zmierzona odpowiedź
• Monitorowanie nasycenia ADC i kontrole odstępów
• Utrzymanie w trybie awaryjnym na podstawie czasu dla niestabilnych odczytów
• Zdefiniowane zachowanie wyłączenia energii, gdy wykrycie staje się niesprawne
Systemy, które przechodzą do przewidywalnego stanu wyłączenia pod wpływem błędów wykrywania, są z reguły łatwiejsze do walidacji i bardziej godne zaufania niż systemy, które próbują kontynuować działanie na podstawie niejednoznacznych informacji zwrotnych.
Zapewnij punkty testowe lub wbudowane diagnostyki, aby usterki mogły być izolowane bez ryzykownego dostępu w pobliżu węzłów wysokoprądowych lub wysokiego napięcia. Zespoły serwisowe zazwyczaj działają szybciej, gdy projekt oferuje jasną metodę potwierdzenia, czy łańcuch czujników jest nienaruszony, a ta prędkość często zmniejsza wtórne uszkodzenia wynikające z powtarzających się prób i błędów.
Udogodnienia projektowe przyjazne dla serwisu:
• Dostępne punkty testowe do sprawdzania napięcia i referencji
• Wbudowane haki do samotestu lub odczyty kalibracyjne, gdzie to możliwe
• Jasne kroki izolacji oddzielające usterki czujników od usterek obciążenia
• Dokumentacja wiążąca mierzone węzły z oczekiwanymi wartościami w bezpiecznych warunkach
Czynniki mechaniczne i bezpieczeństwa są praktyczną drogą, dzięki której dokładność, stabilność i bezpieczne zachowanie utrzymują się w czasie. Bardziej niezawodne projekty czujników prądowych traktują dzielnik prądowy jako element termiczne-mechaniczny najpierw, a idealny rezystor drugi, a następnie dostosowują symetrię układu, dyscyplinę izolacyjną, kontrolę zanieczyszczeń i logikę zabezpieczającą w kontekście rzeczywistego działania.
Przykłady obliczeń
Sensing prądowe oparte na dzielniku prądowym wygląda na czyste na papierze, a równania rzadko sprawiają kłopoty same w sobie. Co często zaskakuje ludzi później, to jak szybko poprawna wartość elektryczna może wyglądać inaczej, gdy temperatura wzrasta, występuje stres montażowy, opór miedzi i zachowanie złączy wchodzą w grę. W codziennych pracach projektowych najbardziej satysfakcjonujący wybór dzielnika prądowego to zwykle ten, który pozostaje przewidywalny w różnych warunkach cieplnych, wariancjach montażu i parazytach okablowania, jednocześnie generując sygnał, który przedni tor analogowy może bez problemu odczytać.
Załóżmy pełnowymiarowy prąd 100 mA i docelowe napięcie czujnika 50 mV. Ten poziom napięcia zazwyczaj wydaje się komfortowy, ponieważ znajduje się powyżej powszechnych przesunięć i poziomów szumów, więc system nie jest zmuszony do poszukiwania rozdzielczości.
Ustawienia elektryczne i obliczenia:
• Opór: R = 0.05 / 0.1 = 0.5 Ω
• Pełnowymiarowy rozkład dzielnika prądowego: P = I² × R = 0.1² × 0.5 = 0.005 W
5 mW wygląda prawie zbyt mało, aby się tym przejmować, jednak trudno zignorować, jak często rzeczywisty sprzęt jest cieplejszy niż pierwotnie zakładała tabela. Wybór wyższej klasy mocy (na przykład 0.25 W) często wydaje się konserwatywny w pozytywny sposób: obniża wzrost temperatury, zmniejsza dryft oporu i daje swobodę, gdy system nie zachowuje się idealnie.
Scenariusze, które często przekraczają łagodne założenia dotyczące mocy: gorące obudowy, pobliskie źródła ciepła, zmniejszona konwekcja, przedłużony prąd uszkodzenia z powodu problemów z oprogramowaniem lub obciążeniem.
Na tym poziomie prądu samonagrzewanie zazwyczaj nie jest dominującym składnikiem błędu, a ta rzeczywistość może być dziwnie uspokajająca: dzielnik może działać prawidłowo, podczas gdy przedni tor cicho ustawia górny limit dokładności.
Sygnał o pełnej skali 50 mV jest zazwyczaj łatwy do wzmocnienia, ale pewność projektu poprawia się, gdy dryft napięcia wpisowego i dryft wzmacniacza pozostają znacznie poniżej zakresu miliwoltów w całym zakresie temperatur. Pomaga również, gdy poziom szumu po wzmocnieniu nie zniekształca najmniejszych kroków, które są istotne. Powszechną frustracją podczas sesji przeglądowych jest widok starannie dobranego dzielnika w parze z wzmacniaczem, którego dryft napięcia wejściowego w całym zakresie temperatur kończy się największym wkładem w budżet błędów.
Nawet przy niskim prądzie, błędy uziemienia mogą stwarzać błędy, które są żenująco większe niż spadek napięcia dzielnika, który zamierzałeś zmierzyć. Ścisłe, sparowane prowadzenie linii czujników oraz czysta strategia odniesienia pomagają unikać przesunięć, które pojawiają się tylko wtedy, gdy inne podsystemy zmieniają stany.
Typowe praktyki układowe, które redukują tajemnicze odczyty: prowadzenie czujników Kelvin do elementu dzielnika prądowego, ścisłe prowadzenie różnicowe, kontrolowane ścieżki powrotne, oddzielenie od pętli o wysokim di/dt.
Załóżmy pełną skale 50 A i docelowe napięcie czujnika 75 mV. Intencja tutaj jest znana: utrzymać straty mocy na rozsądnym poziomie, jednocześnie dostarczając sygnał czujnika, który utrzymuje się w hałaśliwym otoczeniu.
Ustawienia elektryczne i obliczenia:
• Opór: R = 0.075 / 50 = 0.0015 Ω
• Pełnowymiarowy rozkład dzielnika prądowego: P = 50² × 0.0015 = 3.75 W
Część oznaczona na 5 W może być rozsądnie dobrym punktem wyjścia w filtrze, ale etykieta rzadko mówi całą prawdę. W rzeczywistych konstrukcjach wzrost temperatury silnie zależy od sposobu montażu i chłodzenia dzielnika, a szczegóły te mogą dominować nad wynikiem, nawet gdy matematyka elektryczna jest doskonała.
Praktyczne czynniki, które często przewyższają numer katalogowy: powierzchnia i grubość miedzi, przepływ powietrza, interfejs montażowy, bliskość gorących komponentów, chłodzenie obudowy.
Przy 50 A spadek napięcia z złączy i miedzi może osiągnąć poziom 75 mV, co jest dokładnie miejscem, w którym zaczynają się argumenty pomiarowe. Jeśli przewody pomiarowe nie są podłączone bezpośrednio do elementu shunt (połączenia Kelvin), pomiar uwzględni oporność okablowania i styków, które mogą się zmieniać w miarę starzenia złączy, utlenienia i zmiany temperatury. To jest częsta przyczyna, dla której dwa urządzenia, które wyglądają identycznie na biurku, potem różnią się po zainstalowaniu.
Samonagrzewanie przesuwa oporność zgodnie z TCR shunta, a to przesunięcie objawia się jako błąd zysku. Projekt sprawia wrażenie bardziej pod kontrolą, gdy zachowanie termiczne traktowane jest jako część funkcji przenoszenia pomiaru, a nie jako myśl drugorzędna.
Elementy, które często są uwzględniane w realistycznym sprawdzaniu temperatury/error: najgorszy przypadek prądu ciągłego, realistyczny czas trwania awarii, gorące otoczenie, wzrost temperatury obudowy, oporność rozprzestrzeniania miedzi na PCB, nagrzewanie złączy.
Przejrzystość wysokoprądowych transjentów może odsłonić indukcyjność i niestabilność mechaniczną w sposób, który jest trudny do wyrównania w oprogramowaniu. Elementy o niskiej indukcyjności (często konstrukcje metalowe) redukują artefakty pomiarowe podczas szybkich kroków prądowych. Napięcie mechaniczne również zasługuje na szacunek: moment dokręcenia, elastyczność PCB i cykle termiczne mogą przesuwać oporność o małe wartości, które stają się widoczne na poziomach miliomowych.
Mechaniczne/strukturalne czynniki, które inżynierowie często śledzą: zmiana momentu, stos podkładek, creep w czasie, niedopasowanie rozszerzenia termicznego, wibracje.
Załóżmy, że system zasilania ma 10 A w pełnym zakresie i 100 mV docelowego napięcia pomiarowego. Obliczenia są proste, ale zachowanie w terenie często nie jest, zwłaszcza gdy ładowanie i rozładowanie zachodzi w ciepłych przestrzeniach.
Ustawienie elektryczne i obliczenia:
• Oporność: R = 0.1 / 10 = 0.01 Ω
• Dysypacja shunta w pełnym zakresie: P = 10² × 0.01 = 1 W
Część 2 W (lub wyższa) zazwyczaj redukuje wzrost temperatury i poprawia stabilność, co pokrywa się z tym, co wiele zespołów uczy się po pierwszej serii danych z terenu: dryf zazwyczaj ujawnia się, gdy samonagrzewanie i temperatura obudowy się sumują. Wyniki z biurka w temperaturze pokojowej mogą być naprawdę doskonałe, a mimo to nie przewidują zachowania w podwyższonej temperaturze otoczenia.
Warunki, które często ujawniają dryf: ciągłe ładowanie/rozładowanie, gorące obudowy, ograniczony przepływ powietrza, sąsiadujące konwertery mocy nagrzewające płytkę.
Wyższe napięcie pomiarowe poprawia stosunek sygnału do szumów i ułatwia wymagania wzmacniacza, ale zwiększa straty energii i lokalne nagrzewanie. Niższe napięcie pomiarowe zmniejsza dysypację, ale wymusza większy ciężar na offset wzmacniacza, szumach i wykonaniu układu. Wiele solidnych projektów kończy się preferowaniem umiarkowanego napięcia pomiarowego, a następnie poświęca realny wysiłek na zarządzanie termicznym, ponieważ długoterminowe zachowanie jest często bardziej przewidywalne niż dążenie do minimalnych strat.
Oś handlowa, która zazwyczaj jest oceniana razem: margines SNR, możliwości offsetu/dryfu wzmacniacza, dopuszczalna dysypacja, wzrost temperatury, ograniczenia pakowania mechanicznego.
Wybór shunta zazwyczaj przebiega gładko, gdy cele elektryczne i fizyczne rzeczywistości traktowane są jako jeden złączony problem. Następująca sekwencja jest wystarczająco prosta, aby ją powtórzyć, ale na tyle szczegółowa, aby uchwycić problemy, które często pojawiają się później.
Oblicz najpierw cele elektryczne:
• Oblicz oporność shunta na podstawie pożądanego napięcia pomiarowego: R = Vsense / IFS
• Oblicz dysypację używając prądu w najgorszym przypadku: P = IMAX² × R
Podczas definiowania IMAX pomocne jest uwzględnienie transjentów i przypadków awarii, które mogą trwać dłużej, niż pierwsza intuicja podpowiada.
Części o niskim TCR, niskiej indukcyjności i dobrze opisanym zachowaniu dryfu zazwyczaj prowadzą do spokojniejszych cykli debugowania. Konstrukcja, która wspiera pomiar Kelvin, stabilne zakończenia i powtarzalne montowanie, zazwyczaj opłaca się w spójności między jednostkami.
Charakterystyki części często grupowane razem podczas wyboru: TCR, specyfikacja długoterminowego dryfu, uwagi dotyczące obsługi impulsów, indukcyjność, styl końcówek, zalecany wzór terenu, zdolność Kelvin.
Mierz lub modeluj wzrost temperatury shunta w rzeczywistej montażu w gorącym otoczeniu, używając zamierzonej metody montażu i geometrii miedzi. Ten krok zazwyczaj ujawnia czynniki, które inżynierowie chcieliby, aby były mniejsze: założenia dotyczące przepływu powietrza, nagrzewanie, nagrzewanie złączy i oporność rozprzestrzeniania miedzi.
Stabilny punkt widzenia na projekt mówi, że pomiar shunta jest pomiarem elektrycznym osadzonym w termalnym i mechanicznym systemie. Projekty, które uznają to sprzężenie, zazwyczaj dostarczają odczyty, które pozostają spójne w jednostkach, w różnych temperaturach i w czasie.
Wnioski
Dokładny pomiar prądu wymaga więcej niż tylko wyboru rezystora, który spełnia prostą kalkulację. Wartość shunty, straty mocy, wzrost temperatury, tolerancja, TCR, wydajność wzmacniacza, zachowanie ADC i układ PCB mają wpływ na ostateczny wynik. Poprzez zrównoważenie siły sygnału, efektywności, limitów termicznych i źródeł błędów, projektanci mogą budować systemy pomiaru prądu, które pozostają stabilne, dokładne i niezawodne w rzeczywistych warunkach pracy.
Często Zadawane Pytania [FAQ]
1. Dlaczego wybór ekstremalnie niskiego napięcia na shuncie często stwarza więcej wyzwań pomiarowych niż oczekiwano?
Bardzo niskie napięcie na shuncie zmniejsza straty mocy i poprawia efektywność, ale czyni również pomiar bardziej podatnym na przesunięcie wzmacniacza, dryft temperatury, szumy kwantyzacyjne ADC, napięcia termoelektryczne i zakłócenia przełączania. Gdy sygnał staje się mniejszy, te źródła błędów pochłaniają większy procent zakresu pomiarowego. To, co wydaje się efektywne na papierze, może ostatecznie wymagać dodatkowej kalibracji, filtrowania i optymalizacji układu, aby utrzymać stabilne odczyty prądu w różnych temperaturach i warunkach pracy.
2. Dlaczego wybór rezystora shuntowego jest zasadniczo kompromisem między efektywnością a pewnością pomiaru?
Zwiększenie oporu shunta generuje większe napięcie pomiarowe, co poprawia stosunek sygnału do szumów i zmniejsza obciążenie wzmacniacza i ADC. Jednak zwiększa również straty mocy, wzrost temperatury i spadek napięcia dostrzegany przez obciążenie. Zmniejszenie oporu shunta poprawia efektywność i minimalizuje nagrzewanie, ale stawia surowsze wymagania dotyczące dokładności analogowej, jakości układu PCB oraz filtrowania cyfrowego. Udane projekty zazwyczaj zrównoważają oba cele, a nie optymalizują wyłącznie jeden.
3. Dlaczego obwód pomiarowy prądu może wydawać się dokładny w temperaturze pokojowej, ale znacznie się dryfować po rozgrzaniu?
Samonagrzewanie zmienia opór shunta w zależności od jego temperaturowego współczynnika oporu (TCR). Gdy prąd płynie ciągle, shunt i otaczający miedź stopniowo się nagrzewają, co powoduje przesunięcie wartości pomiarowej, nawet jeśli rzeczywisty prąd pozostaje niezmieniony. Dodatkowe ciepło od pobliskich komponentów, wzrost temperatury obudowy i zmiany w przepływie powietrza mogą jeszcze bardziej wzmocnić ten efekt. Zachowanie termiczne często staje się głównym czynnikiem wpływającym na długoterminową dokładność pomiarów.
4. Dlaczego pomiar w technologii Kelvina jest uznawany za niezbędny dla pomiarów shuntów o niskim oporze?
Gdy wartości shunta spadają do zakresu miliomów, opory od ścieżek PCB, otworów przelotowych, lutów i złącz mogą stać się porównywalne z samym shuntem. Pomiar w technologii Kelvina oddziela ścieżkę przewodzącą prąd od ścieżki pomiarowej napięcia, zapewniając, że tylko napięcie na elemencie oporowym jest mierzone. Bez połączeń Kelvina, opór pasożytniczy może wprowadzać błędy zależne od prądu, które różnią się między zmontowanymi układami i pogarszają się z czasem z powodu starzenia się złącz lub stresu mechanicznego.
5. Dlaczego obliczenia strat mocy powinny być oparte na prądzie RMS zamiast prądu szczytowego w wielu zastosowaniach?
Wartości prądu szczytowego mogą wydawać się alarmujące podczas zdarzeń przełączania lub przestarzałych transjentów, ale długoterminowe nagrzewanie jest w głównej mierze określane przez prąd RMS. Prąd RMS odzwierciedla średnią energię dostarczaną do rezystora w czasie i tym samym bezpośrednio wpływa na wzrost temperatury. Projekty, które skupiają się tylko na prądzie szczytowym, mogą niedoszacować stresu termicznego, gdy obciążenia o wysokim cyklu pracy stworzą niemal ciągłe warunki nagrzewania.
Powiązany blog
-
Ile zer na milion, miliard, bilion?
![Ile zer na milion, miliard, bilion?]()
2024/07/29
Million reprezentuje 106, łatwo chwytana liczba w porównaniu do przedmiotów codziennych lub rocznych pensji. Miliard, równoważny 109, zaczyna roz... -
IRLZ44N MOSFET Arkusz, obwód, równoważny, pinout
![IRLZ44N MOSFET Arkusz, obwód, równoważny, pinout]()
2024/08/28
IRLZ44N to szeroko stosowany Mosfet Power N-Kannel.Znany z doskonałych możliwości przełączania, jest bardzo odpowiedni do wielu zastosowań, szcz... -
Temperatura akumulatora zbyt niska, ładowanie zatrzymało się.Jak to naprawić?
![Temperatura akumulatora zbyt niska, ładowanie zatrzymało się.Jak to naprawić?]()
2024/10/6
Problemy z ładowaniem baterii telefonu komórkowego są powszechne, ale można je skutecznie zarządzać.Temperatura odgrywa dużą rolę w wydajnoś... -
BC547 Tranzystor Kompleksowy przewodnik
![BC547 Tranzystor Kompleksowy przewodnik]()
2024/07/4
Tranzystor BC547 jest powszechnie stosowany w różnych zastosowaniach elektronicznych, od podstawowych wzmacniaczy sygnałowych po złożone obwody o... -
Kompleksowy przewodnik po SCR (prostownik kontrolowany krzem)
![Kompleksowy przewodnik po SCR (prostownik kontrolowany krzem)]()
2024/04/22
Kontroli prostownicy (SCR) lub Thyristors odgrywają kluczową rolę w technologii elektroniki energetycznej ze względu na ich wydajność i niezawod... -
LR621, SR621SW, 364, AG1 Equivivalents i zamienniki
![LR621, SR621SW, 364, AG1 Equivivalents i zamienniki]()
2024/07/15
Baterie przycisków LR621 i SR621SW są powszechne w kompaktowych urządzeniach elektronicznych, takich jak zegarki, małe zabawki, kalkulatory i zdal... -
Kompletny przewodnik po multiplekserach i ich rola w systemach cyfrowych
![Kompletny przewodnik po multiplekserach i ich rola w systemach cyfrowych]()
2025/09/20
Multipleksery są komponentami w systemach cyfrowych, zaprojektowanych do kierowania wieloma sygnałami wejściowymi do pojedynczej linii wyjściowej ... -
Podstawy obwodów OP-AMP
![Podstawy obwodów OP-AMP]()
2023/12/28
W skomplikowanym świecie elektroniki podróż do jej tajemnic niezmiennie prowadzi nas do kalejdoskopu komponentów obwodów, zarówno wykwintnych, j... -
Porównanie różnic i zastosowań NMOS i PMOS
![Porównanie różnic i zastosowań NMOS i PMOS]()
2024/11/15
Zrozumienie różnic między tranzystorami NMOS i PMO jest ważne w projektowaniu wydajnych obwodów.NMOS (NMOS-semiconductor) i PMOS (typ p-tlenku-tl... -
CR2450 vs CR2032 Porównanie: Wszystko, co musisz wiedzieć
![CR2450 vs CR2032 Porównanie: Wszystko, co musisz wiedzieć]()
2025/09/15
Baterie guzików, takie jak CR2450 i CR2032, zasilają wiele codziennych elektroniki, od zegarków i pilotów po urządzenia medyczne i przemysłowe.C...










Gorące części
- PCF51JF128VLH
- T6UJ9XBG-0002-L
- ADM1032ARMZ-1
- IS61NLP102418-200B3LI
- DM9103EP
- C3216X6S1V225K160AB
- VI-710264
- GRM0225C1E2R7BDAEL
- HAL506SF-A
- HD643364C61FPV
- AT45DB321E-SHF-B
- CGA4J4X7T2W223K125AE
- UMK325LD105MN-T
- DS1339C-33#TR
- K7N401809B-PC20
- BSC026N04LSATMA1
- OP1177ARMZ
- PMB8868V2.3A
- SME1034LGA
- SAF-C1610-LM
- BH6798FVM
- MCIMX233DJM4B
- UPA1716G-E2-A
- IDT5V41065PGGI
- KM4132G271BQ-10
- PDT20012
- PS2251-63BC-F
- EL6253CU-T13
- ADT7316ARQZ-REEL7
- S5L9278X01-T080
- 06031A101JAT2A
- SC423137FNR2
- MCC95-16IO8B
- SM324QF-BC
- AT840CABC/AT8401
- VT1676SAFQR
- CC1R5-2412DF-E
- MAX4234ASD+T
- T491C336K016AT4153
- T491A684K025ZTZ001
- SPC5602DF1VLL4R
- KLMAG4FEJA-A001/A002
- MB89653ARPF-G-373-BND
- CS5048GO
- LTA301NT/N1
- STA-PX81006
- TNETV1074SP1ZDW
- V59C1512804QDJ3
- HD6433644RC32HV
- HT82A824R