- polski
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC wyjaśnione: funkcje, rodzaje i zastosowania
Katalog

Badanie PMIC
PMIC (Zintegrowany układ zarządzania zasilaniem) to dedykowany układ, który przyjmuje jedno lub więcej wejść zasilania i produkuje wiele regulowanych, kontrolowanych szyn zasilających dla różnych obciążeń na płycie. Te obciążenia często obejmują procesory, pamięć, sekcje RF, czujniki i różne peryferia.
Zamiast rozpraszać dyskretne regulatory i układy nadzoru w całym projekcie, PMIC konsoliduje je w jednego skoordynowanego menedżera obszaru zasilania. Dla wielu zespołów ta konsolidacja przynosi także pewien spokój podczas uruchamiania, ponieważ jest jedno miejsce, w którym można szukać, gdy szyny zachowują się dziwnie.
Procesory, pamięć, bloki RF, czujniki i inne obciążenia.
Zakres funkcjonalny
W rzeczywistych produktach wkład PMIC wykracza daleko poza konwersję napięcia. Praktyczna korzyść ujawnia się, gdy działa jak koordynator zasilania na poziomie systemu, który łączy kilka odpowiedzialności, które naturalnie współdziałają podczas startu, kroków obciążenia w czasie pracy i warunków awaryjnych.
Konwersja
PMIC może łączyć różne typy regulatorów, aby szyny zasilające skoncentrowane na wydajności oraz szyny wrażliwe na szumy mogły być optymalizowane oddzielnie. W rzeczywistych projektach głównym zmartwieniem często nie jest generowanie wymaganego napięcia, ale utrzymanie stabilnego napięcia podczas zmian obciążenia, zdarzeń uruchamiających i innych wymagających warunków pracy.
Regulatory buck, regulatory boost, regulatory buck-boost i regulatory LDO.
Szyna, która wygląda na czystą przy stabilnym obciążeniu, może stać się widocznie przeciążona pod rzeczywistymi profilami. Wydajność, szum, odpowiedź transientowa i margines termiczny są często dokładnie badane, gdy testowane są prądy skokowe CPU, impulsy transmisji RF lub szczyty próbkowania czujników w rzeczywistych warunkach pracy.
Szczyty prądów skokowych CPU, impulsy transmisji RF i szczyty próbkowania czujników.
Dystrybucja
Po wygenerowaniu szyn, PMIC często dyktuje, jak są one dzielone, przełączane i izolowane. W tym miejscu projekt może wydawać się albo solidny, albo delikatny, szczególnie podczas hot-plug, brownout i zdarzeń związanych z kablami. Gdy dystrybucja jest obsługiwana w przemyślany sposób, przyrostowe prądy są kontrolowane, ścieżki zwrotne są ograniczone, a usterka jest mniej prawdopodobna, aby przekształciła się w awarię całej płyty.
Włączanie szyn, przełączniki obciążenia, ograniczanie prądu i ORing diody idealnej dla wejść multi-source.
Wykrywanie i nadzór
Większość PMICów integruje nadzorców, którzy nieustannie monitorują stan szyn i dostarczają sygnały, które oprogramowanie i sprzęt mogą interpretować. W laboratorium te funkcje szybko przestają być postrzegane jako miłe dodatki i zaczynają być różnicą między czystą sesją debugowania a dniem spędzonym na ściganiu resetu, który nie chce się powtórzyć na żądanie.
Monitory niedociśnienia, monitory nadciśnienia, wykrywanie prądu, czujniki cieplne i sygnalizacja prawidłowego zasilania.
Jedną z lekcji, która często pozostaje w pamięci doświadczonych zespołów uruchamiających, jest to, że progi dobrego zasilania i czas deglitczowania muszą być jednoznaczne. Gdy są niejasne lub źle dopasowane do systemu, często skutkuje to fałszywymi resetami lub problemami z uruchamianiem, które pojawiają się tylko w ekstremalnych temperaturach, na niektórych akumulatorach lub po sekwencji szybkich restartów.
Kontrola i sekwencjonowanie
PMIC często zawiera mechanizmy kształtujące sposób, w jaki szyny rosną, opadają i współpracują ze sobą. Te szczegóły objawiają się jako konkretne wyniki: czy system uruchamia się powtarzalnie, czy komponenty są narażone na nieunikniony stres i czy płyta wraca do znanego stanu po awarii.
Sekwencjonowanie, łagodny start, kształtowanie nachylenia, ścieżki rozładowania i konfigurowalne czasy między szynami.
System cyfrowy zazwyczaj nie wymaga tylko prawidłowych napięć w stanie ustalonym; oczekuje również, że szyny pojawią się w określonej kolejności i w ograniczonych relacjach czasowych. Jeśli nachylenia są zbyt strome, zbyt wolne lub po prostu źle uporządkowane, struktury wewnętrzne i domeny mogą znaleźć się w nieokreślonych warunkach, które są irytująco przerywane, szczególnie w kontekście zachowania pamięci SRAM i uruchamiania interfejsów wysokiej prędkości.
Wewnętrzne struktury ESD, domeny retencji SRAM i interfejsy wysokiej prędkości.
Co kształtuje wyniki w rzeczywistych projektach
Gdy zespół przechodzi od diagramu blokowego do działającego prototypu, wybór i konfiguracja PMIC często odnoszą sukces lub ponoszą porażkę w oparciu o szczegóły operacyjne, a nie specyfikacje na poziomie marketingowym. Subtelne problemy to te, które wywołują presję czasową, ponieważ pojawiają się późno i rzadko ujawniają się jako jeden, oczywisty czynnik przyczynowy.
Radzenie sobie z szybkimi transjentami i dynamicznymi obciążeniami
Nowoczesne procesory i sekcje RF mogą wymagać dużych skoków prądu w mikrosekundowych skalach czasu. PMIC może wyglądać na całkowicie akceptowalny na papierze, a mimo to pokazywać spadki, przeciążenia lub oscylacje, gdy pętla kontrolna, podejście kompensacyjne, sieć wyjściowa i parazyty PCB muszą ze sobą interagować w rzeczywistym układzie.
Spadki, przeciążenia i oscylacje.
Zespoły, które testują reakcję transjentną na początku, często robią to, ponieważ odczuły ból związany z późnym jej odkryciem. Wczesna walidacja może zmniejszyć szanse na niewygodny cykl przeprojektowania dotyczący induktorów, kondensatorów wyjściowych, komponentów kompensacyjnych, a nawet samego wyboru PMIC.
Induktory, kondensatory, komponenty kompensacyjne i sam PMIC.
Sekwencjonowanie jako umowa systemowa, a nie wygoda
Sekwencjonowanie mocy działa najlepiej, gdy traktuje się je jako umowę dotyczącą wymagań dotyczących krzemu, założeń dotyczących oprogramowania układowego i zachowania płyty. Gdy szybkości narastania i czasy sygnału dobrego zasilania odbiegają od tego, co oczekuje karta danych procesora, lub od tego, co implikuje oprogramowanie układowe, tendencje pojawiają się problemy z uruchamianiem.
Wymagania dotyczące kart danych procesora i oczekiwania dotyczące oprogramowania układowego.
Co sprawia, że te problemy są szczególnie frustrujące, to ich tendencja do znikania w przyjaznych warunkach laboratoryjnych i powracania w ekstremalnych temperaturach, podczas podłączania akumulatora na gorąco lub w marginalnych warunkach zasilania. W tych środowiskach deterministyczne sekwencjonowanie i przewidywalne zachowanie resetu zmniejszają niespodzianki i skracają cykle debugowania.
Ekstremalne temperatury, zdarzenia podłączania akumulatorów na gorąco i warunki przypominające brązowe.
Zachowanie ochronne jako dźwignia czasu pracy i kosztów serwisu
Limity prądowe, wyłączanie termiczne i ochrona UV/OV często omawiane są w języku bezpieczeństwa, ale wdrożone produkty doświadczają ich jako funkcji dostępności. PMIC, który płynnie ogranicza prąd, zgłasza usterki w wystarczająco jasny sposób, aby można było podjąć działania, i odzyskuje się w kontrolowany sposób, może zapobiec drobnej awarii peryferyjnej przekształcającej się w całkowitą awarię systemu oraz zgłoszenie do pomocy technicznej.
Mechanizmy ochrony: Ochrona przeciążeniowa, wyłączanie termiczne, ochrona przed niedociśnieniem i ochrona przed nadciśnieniem.
Korzyści związane z niezawodnością systemu: Płynne ograniczenie prądu, raportowanie usterek i kontrolowane odzyskiwanie.
Często dokładniej i szczerze bardziej użytecznie podczas kompromisów projektowych myśli się o PMIC jako części architektury niezawodności systemu, a nie tylko jako o konwerterze mocy. Projekty, które dobrze się starzeją, tendują do wyboru PMIC na podstawie tego, jak konsekwentnie egzekwuje przewidywalne stany zasilania w normalnej pracy, obsłudze awarii i przy przejściach.
Gdy ten punkt widzenia jest traktowany poważnie, szczegóły, które łatwo zbagatelizować podczas wczesnego planowania, zaczynają wyglądać inaczej w trakcie integracji. Zachowanie rozładowania szyn, integralność sygnału dobrego zasilania i telemetria usterek stają się cechami, które oddzielają urządzenie, które po prostu włącza się w laboratorium, od urządzenia, które uruchamia się czysto, powtarzalnie i przewidywalnie w terenie, bez potrzeby, aby zespół inżynieryjny miał szczęście.
Kategorie PMIC
PMIC-i są często oznaczane przez funkcję nagłówkową, jednak w sprzęcie wysyłkowym tendencja do działania jako zwarty, skoordynowany podsystem zasilania, a nie jako komponent jednofunkcyjny. Praktycznym sposobem na sortowanie typów PMIC jest spojrzenie na (a) co regulują, (b) co ograniczają lub egzekwują, oraz (c) co łączą, rozłączają lub aktywnie napędzają. Z perspektywy uruchamiania systemu, linia podziału, która wciąż się pojawia, mniej dotyczy regulacji liniowej w porównaniu do przełączania, a bardziej tego, czy PMIC został zbudowany, aby zarządzać interakcją między zasilaniem a obciążeniem w zmieniających się warunkach. Kiedy ta interakcja jest odpowiednio obsługiwana, płytki są bardziej spokojne podczas testów obciążeniowych; gdy tak nie jest, ten sam projekt może wyglądać dobrze na zasilaniu laboratoryjnym, ale staje się kapryśny w w pełni zmontowanym produkcie.
Podstawowe grupy funkcjonalne
Te bloki generują napięcia, ustawiają punkty robocze i pochłaniają zmiany warunków wejściowych. Typowo obejmują wszystko, od niskoprądowych cichych napięć do wysokoprądowych obszarów cyfrowych.
• Regulacja liniowa (LDO)
• Regulacja przełączania (buck, boost, buck-boost, inwersyjne, pompy ładunkowe)
• Przednia konwersja i wstępna regulacja (adaptery AC/DC, etapy odbiorników USB-PD, wstępne regulatory samochodowe na niektórych platformach)
Te bloki kształtują sposób, w jaki energia może się zachowywać, definiując progi, obserwując granice i reagując na usterki. Mogą nie dostarczać watów, ale często decydują, czy system zawiesza się w sposób czysty, czy w tajemniczy.
• Odniesienia napięciowe i przerwy napięcia
• Nadzorcy, monitory i komparatory okienkowe
• Generowanie resetów, timery watchdog i detekcja spadku napięcia
• Sekwencjonowanie, śledzenie i odpowiedź na usterki (UV/OV, przeciążenie, odpowiedź termalna)
Te bloki określają, gdzie energia płynie, kiedy jest izolowana i jak napędzane są zewnętrzne obciążenia. W rzeczywistych projektach to tutaj pierwsze pojawiają się przypadki graniczne, hot-plug, spadki kabli, usterki akcesoriów.
• Zarządzanie ścieżką zasilania
• Przełączniki obciążenia i eFusy
• Ładowanie baterii
• Napędy i napięcia związane z wyświetlaczem
• Napędy bramkowe MOSFET
Typy regulacji/konwersji
LDO są zwykle wybierane, gdy pożądane są niskie szumy wyjściowe, prosty proces projektowania i szybkie zachowanie w małych sygnałach. Często pojawiają się w blokach RF, napięciach audio, czujnikach o dużej precyzji i zasilaniach związanych z odniesieniem ADC, gdzie szum falowy może prowadzić do mierzalnej utraty wydajności.
Ciepło jest często czynnikiem ograniczającym wydajność regulatora. W miarę jak różnica napięcia wejściowego i wyjściowego rośnie lub prąd obciążenia wzrasta, rozpraszanie mocy i temperatura mogą stać się ważniejsze niż specyfikacje dokładności elektrycznej.
Szyna zasilająca, która wydaje się stabilna podczas otwartych testów kontrolnych, może rozwijać poważne problemy z nagrzewaniem wewnątrz zamkniętych systemów lub w warunkach wysokotemperaturowych, gdzie przepływ powietrza i marginesy termalne są ograniczone.
Konwertery buck przejmują dużą część obciążenia dla efektywnych rdzeni zasilających: procesory aplikacyjne, DSP, szyny DDR i inne wysokoprądowe obszary cyfrowe. W praktyce dwie płytki korzystające z tego samego bucka mogą zachowywać się bardzo różnie w zależności od trybu sterowania, trybów pracy przy lekkim obciążeniu oraz parazytów z układu.
• Podejście do kontroli (tryb napięcia, tryb prądu, histereza, czas włączania)
• Zachowanie podczas lekkiego obciążenia (PFM, pomijanie impulsów, wymuszony PWM)
• Odpowiedź transjentna w porównaniu do kompromisów szumów wyjściowych
• Postawa EMI (opcje rozszerzonego widma, wybór częstotliwości przełączania, czułość układów)
Szczegół, który zwykle zaostrza przegląd projektów, to rzeczywistość profilu obciążenia. Konwerter, który wygląda doskonale przy 2 A, może spędzić większość swojego życia przy 20–200 mA, gdzie dominują przejścia trybów, straty energii w naładowaniu bramki i narzuty przełączania. Porównywanie tylko wartości szczytowej wydajności może prowadzić do gorszej niż oczekiwana żywotności baterii podczas rzeczywistej pracy w porównaniu do początkowych szacunków.
Konwertery boost są zazwyczaj stosowane, gdy docelowa szyna musi przekroczyć źródło; powszechne przykłady obejmują generowanie 5 V z pojedynczej baterii, tworzenie napięć zasilających dla wyświetlacza lub zasilanie ciągów LED. Topologie buck-boost są preferowane, gdy wejście może przechodzić powyżej i poniżej pożądanego wyjścia, na przykład utrzymując stabilną szynę systemową wzdłuż pełnej krzywej rozładowania baterii.
Te konwertery często rozwiązują problemy na poziomie systemu, takie jak utrzymanie stabilności domeny 5 V podczas spadku napięcia w baterii, ale to ulga wiąże się z większą liczbą ruchomych części: złożonością kompensacji, zachowaniem ograniczenia prądu włączania oraz przewodzonym EMI, który może być zaskakująco wrażliwy na geometrię płytki i warunki kabli.
W telefonach i małych modułach IoT, brick AC/DC znajduje się zwykle na zewnątrz produktu, jednak negocjacje na froncie i ochrona wejściowa coraz częściej trafiają do wnętrza urządzenia. Nawet gdy karta data promuje te funkcje jako cechy USB, a nie funkcje PMIC, mocno kształtują rozmiar konwertera w dalszej drodze, rozkład ciepła oraz najgorszy przypadek obciążenia.
• Wykrywanie i wsparcie negocjacji USB-PD
• Ograniczenie prądu wejściowego i kontrola prądu rozruchowego
• Ochrona przed przepięciami dla akcesoriów USB i zasilaczy
Bloki wsparcia precyzyjnego
Odniesienia do dokładności zakotwiczenia dla ADC, DAC i progów komparatorów. W produktach mieszanych sygnałach, szczegóły, które wielokrotnie mają znaczenie, to zachowanie dryfu, gęstość hałasu oraz PSRR w odpowiednim zakresie częstotliwości. Może to wydawać się nieintuicyjne, ale niewielka ilość hałasu odniesienia może objawić się jako mierzalny jitter, błąd czujnika lub niejednoznaczność progu, gdy zostanie pomnożona przez wybory wzmacniania i filtrowania w rzeczywistym świecie.
Nadzorcy monitorują szyny w poszukiwaniu niedoborów napięcia, przepięć i naruszeń sekwencjonowania. W systemach wieloszynowych pomagają unikać stanów „półżywych”, w których jeden obszar się uruchamia i zaczyna działać, podczas gdy inny obszar jest spóźniony, w stanie brązowym lub oscylującym.
Z perspektywy niezawodności, solidne monitorowanie ma tendencję do redukowania rodzaju przerywanych zwrotów z pola, które frustrują wszystkich: problemy, które pojawiają się tylko podczas zimnych startów, uruchamiania przy niskim poziomie baterii, szybkich zdarzeń hot-plug lub kabli na granicy, które nigdy nie były w „szczęśliwej ścieżce” laboratorium.
Sekwencjonowanie to więcej niż szyna A, a następnie szyna B. Przeradza się w dyskusję o tolerancji czasowej, nachyleniu rampy, relacjach resetujących i tym, co system robi, gdy szyna przeoczy swoje okno.
Dokumentacja SoC często określa zależności IO-przed-jądrem, ograniczenia szkolenia pamięci i dokładny czas odwołania resetu. PMIC z programowalnym sekwencjonowaniem i kontrolowanymi rampami może zmniejszyć potrzebę zewnętrznej logiki klejowej i sprawić, że uruchomienie stanie się mniej przypominające zgadywanie, zwłaszcza kiedy płytki są szybko iterowane, a drobne zmiany czasowe mogą zaoszczędzić dni debugowania.
Funkcje Power-Path i Drive
Logika ścieżki zasilania decyduje, czy system działa z USB, baterii, czy ich mieszanki, i wpływa na to, co się dzieje podczas przejść.
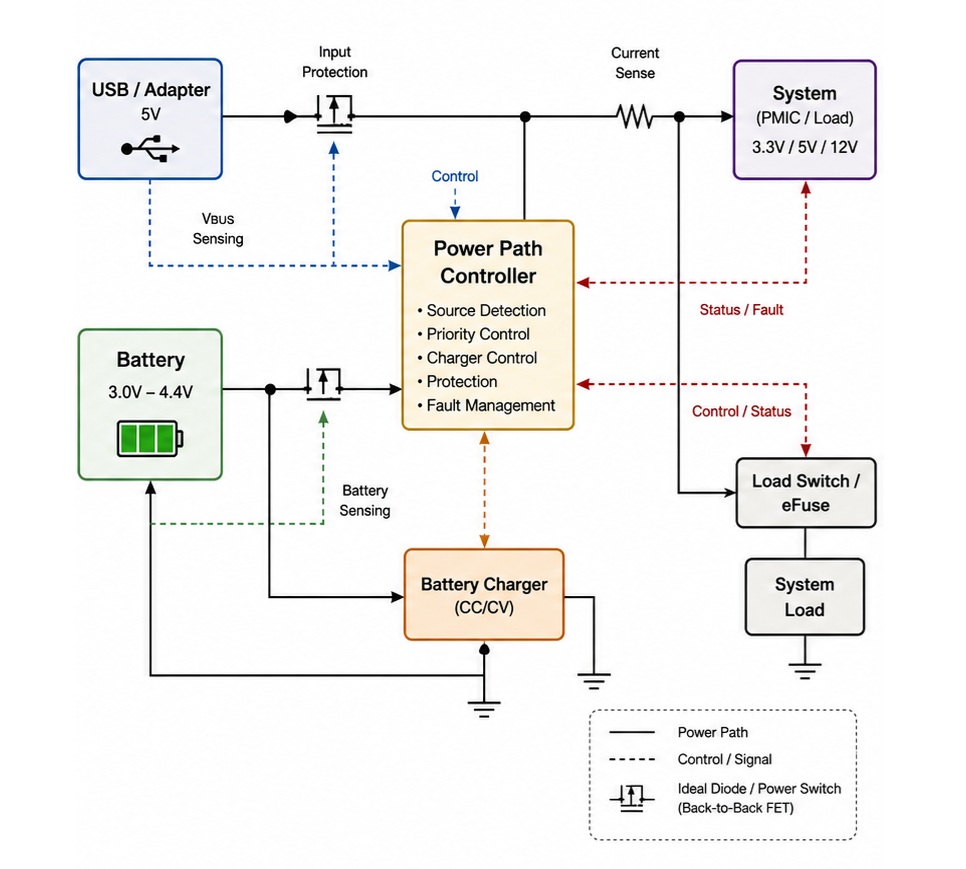
• Płynne przechodzenie (ograniczanie spadków, które uruchamiają reset)
• Ograniczenie prądu wejściowego, aby dopasować do USB/zasilaczy i ograniczeń zgodności
• Zachowanie idealnej diody w celu redukcji prądu wstecznego
Cykliczną pułapką w rzeczywistym świecie jest niedoszacowanie oporu w kablach, złączach i elementach ochronnych. Podczas szybkiego przejścia, PMIC może działać dokładnie zgodnie z projektem, a system nadal może doświadczyć spadku napięcia, ponieważ górny szlak opada bardziej, niż model zakładał. Te awarie wydają się „niedorzeczne”, dopóki pełna impedancja ścieżki nie zostanie zmierzona i potraktowana jako część projektu, a nie przypis.
Ładowarki różnią się wsparciem dla chemii baterii, topologią obwodu, cechami termalnymi i celami projektowymi. Wspólne priorytety obejmują szybsze ładowanie, niższą temperaturę powierzchni, zmniejszone EMIs lub utrzymanie wydajności systemu podczas ładowania.
• Ładowarki liniowe
• Ładowarki przekształtnikowe
• Tryby power-bank/OTG
Wybór często sprowadza się do budżetu cieplnego, ograniczeń regulacyjnych lub interoperacyjnych oraz tego, czy oczekuje się, że urządzenie będzie utrzymywać pełną wydajność podczas ładowania, nie czując się ospale ani nie nagrzewając się nieprzyjemnie.
Przełączniki obciążenia są powszechnie używane do otwierania szyn w celu zmniejszenia mocy w trybie gotowości i do izolacji obszarów w czasie wystąpienia awarii lub transportu. eFuses dodają programowalne limity prądowe, timery awarii i kontrolowane zachowanie włączania.
W wielu produktach, te bloki zwracają swoją powierzchnię na płytce, przekształcając chaotyczne tryby awarii, zwarcia złącza, błędy akcesoriów, zdarzenia złego podłączenia, w incydenty kontenerowe zamiast kaskadowych resetów lub uszkodzeń fizycznych, które są kosztowne w diagnozowaniu i jeszcze trudniejsze do odtworzenia.
Systemy wyświetlania często wymagają wielu szyn zasilających, takich jak AVDD, VGH i VGL z starannie kontrolowanym sekwencjonowaniem uruchamiania, aby uniknąć widocznych artefaktów wyświetlania. Sterowniki LED muszą również precyzyjnie regulować prąd i niezawodnie reagować na błędy otwartego przewodu i zwarcia, ponieważ te warunki występują powszechnie podczas pracy.
Sterowniki bramek i wyższe etapy mocy stają się coraz bardziej istotne w robotyce, motoryzacji i sprzęcie przemysłowym, gdzie sterowanie silnikiem i konwersja wyższych napięć współczesne z koordynacją PMIC, telemetrią oraz politykami ochrony.
Typowy „PMIC do telefonów/IoT”
W wielu telefonach i kompaktowych modułach IoT, PMIC jest najlepiej rozumiane jako zamierzona mieszanka bloków, a nie jako jedna kategoria. Integracja ma na celu zwykle zmniejszenie powierzchni PCB, uproszczenie sekwencjonowania i danie oprogramowaniu jednego miejsca do obserwacji i wpływania na zachowanie zasilania.
• Wiele konwerterów buck o wysokiej wydajności dla CPU, GPU, pamięci i szyn zawsze włączonych
• Jeden lub więcej LDO dla analogowych i RF o niskim hałasie
• Obwody ładowarki i ścieżki zasilania dla koordynacji USB i baterii
• Monitory, sekwencery, kontrolki termalne i raportowanie przerwań dla telemetrii i obsługi awarii
To, co ma tendencję do dominacji wyników, to interakcja szyn. Transient buck może sprzęgać się z RF LDO poprzez współdzieloną impedancję uziemienia. Ograniczenie termiczne ładowarki może cicho obniżać dostępny prąd systemowy, a ta zmiana może powodować spadek rdzenia szyny podczas szczytu obciążenia. Projekty, które oceniają każdy blok w izolacji, często wyglądają na czyste w początkowych testach laboratoryjnych, a potem stają się kłopotliwe podczas zintegrowanych testów obciążeniowych, gdy wszystko przełącza się, nagrzewa i negocjuje jednocześnie.
Wybór i integracja
Regulatoty przełączające są zazwyczaj wybierane, aby zmniejszyć straty, ale mogą wprowadzać tętnienia i EMI, które rozprzestrzeniają się na wrażliwe obszary. LDO często tłumią szum, ale koszt pojawia się jako ciepło, gdy przestrzeń napięcia jest duża lub prąd jest znaczny.
• Regulatoty przełączające: wyższa wydajność, więcej pracy przy zarządzaniu tętnieniami/EMI
• LDO: mniejszy szum, wyższe rozpraszanie ciepła przy obniżaniu napięcia
Kompromis, który często dobrze działa, polega na użyciu bucka do stworzenia pośredniej szyny, a następnie użyciu LDO do finalnej wrażliwej szyny, pod warunkiem, że przestrzeń napięcia i zachowanie termiczne były zaplanowane celowo, a nie pozostawione po innych decyzjach.
Szybkie zmiany obciążenia wymagają szybkich pętli kontrolnych, odpowiedniego projektowania kompensacji i wystarczającej pojemności wyjściowej, aby utrzymać stabilną regulację podczas pierwszych mikrosekund reakcji. Wybór kondensatorów obejmuje więcej niż tylko zwiększenie pojemności. Efektywna pojemność może maleć z powodu napięcia stałego, zmian temperatury i starzenia się. ESR i ESL także wpływają na stabilność obwodu, odpowiedź przejściową i wydajność EMI, co czyni je ważnymi czynnikami projektowymi.
Zespoły, które weryfikują dokładny dielektryk kondensatora, ocenę napięcia i rozmiar obudowy przewidziane do produkcji, zazwyczaj unikają niespodzianek związanych ze stabilnością na późnym etapie, zwłaszcza gdy łańcuchy dostaw wymuszają równoważne substytucje, które są równoważne tylko na papierze.
Zachowanie PMIC pod kątem wystąpienia awarii można zaprojektować według różnych filozofii. Jedno podejście stara się o łagodną degradację, zarządzanie spadkiem napięcia, wskazówki do dławienia dla procesora, selektywne zrzucanie szyn, aby system pozostawał użyteczny w trybie ograniczonym. Inne podejście wymusza deterministyczne wyłączenie, aby szybko osiągnąć znany bezpieczny stan.
• Łagodna degradacja: często zgodna z celami doświadczenia użytkownika w produktach konsumenckich
• Deterministyczne wyłączenie: często zgodne z przewidywalnym zachowaniem w projektach z naciskiem na bezpieczeństwo
PMIC, który najlepiej pasuje, to zazwyczaj ten, którego sekwencjonowanie i reakcje na awarie odpowiadają zamierzonemu zachowaniu produktu, a nie ten, który reklamuje najdłuższą listę kontrolną.
Wyższe częstotliwości przełączania i szerokozakresowe etapy mocy zwiększają osiągalną gęstość mocy, ale jednocześnie tworzą surowsze wymagania dotyczące układów PCB i większą wrażliwość na EMI. Jednocześnie cechy oprogramowania, takie jak telemetria, przerwania, funkcje rejestrowania i programowalne polityki kontrolne, stają się ważnymi czynnikami w zarządzaniu ogólnym systemem zasilania i integracją.
PMIC, które utrzymują przewidywalne zachowanie zasilania pod prawdziwymi obciążeniami, mogą znacznie skrócić czas debugowania, szczególnie w systemach zarządzających radiofonami, procesorami, operacjami ładowania i jednocześnie ograniczeniami termicznymi.
Zakres zastosowania PMIC
PMIC pojawiają się wszędzie, gdzie energię elektryczną trzeba przekształcać, rozdzielać, sekwencjonować, obserwować i zabezpieczać, jednocześnie kontrolując straty i zakłócenia. Są rutynowo stosowane w projektach konsumenckich, przedsiębiorstw, motoryzacyjnych i przemysłowych, ale granica zazwyczaj nie przebiega wzdłuż rynku końcowego, lecz w tym, jak wygląda struktura zasilania w praktyce. W momencie, gdy produkt zawiera wiele szyn o różnej tolerancji na szum, różnym zachowaniu pod obciążeniem oraz różnymi oczekiwaniami co do awarii, PMIC przestaje być postrzegany jako "wybór części" i zaczyna działać jako siła kształtująca zachowanie systemu. W wielu rzeczywistych projektach, gdy wysokowydajny procesor jest połączony z radiami, czujnikami, pamięcią i szybkim wejściem/wyjściem, architektura zasilania ogranicza to, co platforma może konsekwentnie dostarczać, nawet gdy obliczenia i oprogramowanie wyglądają solidnie na papierze.
Gdzie zachowanie PMIC ogranicza wyniki systemów w rzeczywistości
Odpowiedź na transjent obciążenia, która cicho ustala ograniczenie
Nowoczesne procesory CPU i GPU pobierają nagłe skoki prądu podczas działania boost i burst, a te skoki mogą być zaskakująco nieprzewidywalne. Kiedy pętla kontrolna PMIC, pojemność wyjściowa i impedancja dystrybucji nie mogą utrzymać szyny w wąskich granicach, zespoły programistyczne często reagują w sposób subtelny, ale kosztowny: skracają okna boost, obcinają zegary szczytowe lub wstawiają szersze pasma ochronne, aby katastrofy nie pojawiały się w terenie. Z inżynieryjnego punktu widzenia, ten kompromis może być frustrujący, ponieważ platforma może wyglądać na wydajną, pozostawiając jednocześnie wydajność na stole w realistycznym ruchu.
Zespoły, które walidują tylko za pomocą statycznych obciążeń lub wzorów laboratoryjnych, mają tendencję do późnego uczenia się tego. Rzeczywiste obciążenia tworzą postrzępione krawędzie: krótkie wybuchy gier, wzrosty inferencji AI oraz wydarzenia współistnienia radiowego mogą powodować spadki napięcia, które nigdy nie wystąpiły, gdy zasilanie było testowane z łagodnym profilem na stole. Niewygodną lekcją jest to, że powtarzalne zachowanie przejściowe w trudnych obciążeniach często przynosi więcej użytecznego výkonu niż dążenie do korzystnej wartości efektywności w jednym punkcie pracy.
Szum i zakłócenia, które przekształcają się w długoterminową jakość sygnału
Szum nie powinien być traktowany tylko jako parametr wydajności analogowej. Harmoniczne przełączania i szum szerokopasmowy mogą wpływać na rozdzielczość ADC, zwiększać szum fazowy RF oraz zmniejszać margines sygnału SERDES, zwłaszcza gdy zasilania dzielą ścieżki powrotne lub sprzężają się przez indukcyjność pakietu i PCB. Zasilanie, które wydaje się czyste w testach jednowiązkowych, może zachowywać się całkowicie inaczej w pobliżu interfejsów wysokiej prędkości, anten lub gęstych sekcji pamięci.
Realizacje układów zmieniają również przekaz. Ograniczenia mechaniczne i strefy zakazu zmuszają do kompromisów, a te kompromisy mogą wzmacniać ścieżki sprzężenia, które były niewidoczne w idealnym układzie. W praktyce rozwiązanie zasilania zyskuje zaufanie, gdy pozostaje stabilne i ciche w przypadku niedoskonałego umiejscowienia i nieoptymalnego routingu, a nie tylko wtedy, gdy jest mierzone w konfiguracji demowej w najlepszym przypadku.
Rozruch i sekwencjonowanie, które kształtują wyniki niezawodności
Kolejność uruchamiania zasilania i zachowanie rampy decydują, czy szkolenie pamięci kończy się konsekwentnie, radia kalibrują się bez dziwnych awarii w narożnikach, a strefy zawsze aktywne pozostają stabilne podczas zaników zasilania. Marginalne sekwencjonowanie często produkuje rodzaj wzoru awarii, który pochłania czas i morale: „jedno na pięćdziesiąt uruchomień”, trudne do odtworzenia, a jeszcze trudniejsze do debugowania, gdy system jest w pełni zintegrowany.
Sekwencjonowanie zazwyczaj działa lepiej, gdy jest traktowane jako część zachowania resetu i odzyskiwania, a nie jako późna lista kontrolna. Projekty, które sprawdzają się w produkcji, zazwyczaj traktują pełną ścieżkę zasilania/wyłączania jako powtarzalną maszynę stanową, a następnie udowadniają to w najgorszych warunkach szybkości rampy, niskiej temperatury i warunkach słabej baterii. Automatyczne cykle zasilania są często miejscem, w którym zdobywa się zaufanie, ponieważ ujawniają przerywane krawędzie, których kilka ręcznych przełączeń zasilania nigdy nie ujawnia.
Kryteria wyboru jako przestrzeń handlowa systemu
Efektywność oceniana w różnych trybach, a nie jako trofeum
Efektywność zmienia znaczenie w zależności od tego, jak produkt rzeczywiście spędza swój czas. Efektywność szczytowego obciążenia może wydawać się imponująca w specyfikacjach, ale rzeczywista żywotność baterii i wydajność cieplna zależą od wielu warunków pracy, w tym przetwarzania impulsowego, normalnego obciążenia, lekkiego obciążenia oraz trybu głębokiego uśpienia. Straty przełączania, straty przewodzenia i prąd spoczynkowy konkurują inaczej w każdym regionie, a „zwycięzca” zmienia się wraz z profilem obciążenia.
W przypadku projektów zasilanych bateriami, niski Iq i silna efektywność przy lekkim obciążeniu często objawiają się bezpośrednio jako dłuższy czas między ładowaniami, co zespoły produktowe mają na myśli w bardzo konkretny sposób. W przypadku serwerów i sprzętu sieciowego, straty przewodzenia i ograniczenia cieplne zazwyczaj dominują, ponieważ stały prąd i usuwanie ciepła stają się codzienną rzeczywistością. Ugruntowany sposób określenia tego jest taki, aby powiązać cele efektywności z rozkładem czasowym obciążeń, zamiast optymalizować punkt pracy, który prawie nigdy nie występuje w polu.
Przestrzeń cieplna, która zapobiega załamaniu wydajności pod wpływem ciepła
Granice cieplne często definiują maksymalny zrównoważony prąd, który z kolei definiuje maksymalną zrównoważoną moc obliczeniową. PMIC może wyglądać elektrycznie doskonale i nadal nie spełniać celów systemowych, jeśli jego pakiet, miedź i rozmieszczenie tworzą lokalne gorące miejsca w pobliżu pamięci, osłon lub wrażliwych na temperaturę bloków RF. W rzeczywistych zespołach niewielkie wzrosty temperatury mogą wywołać zachowanie ograniczające, progi ochronne lub długoterminowe zmartwienia dotyczące niezawodności, które nikt nie chce wyjaśniać po premierze.
Projekty, które starzeją się dobrze, zazwyczaj planują na luz cieplny. To planowanie często objawia się jako charakterystyka cieplna pakietów, która odpowiada obciążeniu, wielofazowa zdolność, gdy profil prądu to uzasadnia, oraz strategia układu, która rozprasza ciepło, jednocześnie utrzymując pętle prądowe wystarczająco krótkie, aby uniknąć przekształcania poprawek cieplnych w problemy z szumem.
Ograniczenia EMI, które zwiększają koszty harmonogramu i iteracji
Częstotliwość przełączania, szybkości krawędzi i topologia sterowania silnie wpływają na to, czy EMI można obsłużyć za pomocą prostego filtrowania, czy staje się cyklem obrotów płyt i nocnych sesji laboratoryjnych. Zgodność z kartą katalogową to tylko część historii; wrażliwość układu może dominować wyniki. Rozwiązanie, które wymaga prawie idealnej geometrii pętli, może stać się grą hazardową, gdy ograniczenia mechaniczne wymuszają niezręczne rozmieszczenie.
Wiele zespołów kończy na preferowaniu nieco wolniejszego, bardziej kontrolowanego rozwiązania, o zarządzalnych prędkościach zmian i przewidywalnym zachowaniu spektralnym, ponieważ skraca to czas debugowania i obniża ryzyko certyfikacji. Taki wybór może wydawać się konserwatywny, jednak często zgadza się z rzeczywistością, że problemy EMI mają tendencję do pojawiania się w ostatniej chwili, gdy harmonogram jest najmniej wyrozumiały.
Funkcje ochrony, które definiują doświadczenie awarii i zachowanie serwisowe
Zachowanie ochrony silnie wpływa na odpowiedź systemu w warunkach awarii. Ustawienia OCP, OVP, OTP i ochrony przed zwarciem mogą określić, czy system przeprowadzi czyste wyłączenie, wejdzie w tryb latch-off, czy powtarzająco uruchomi się z niestabilnym zachowaniem. Te reakcje bezpośrednio wpływają na trudność w rozwiązywaniu problemów, wymagania wsparcia oraz ogólną percepcję niezawodności produktu.
Ustawienia ochrony również wchodzą w interakcję z normalnymi zdarzeniami operacyjnymi. Agresywne ograniczanie prądu może zmniejszyć ryzyko uszkodzenia, jednak może również wywołać powtarzające się resetowanie w trakcie intensywnych impulsów lub skoków przy uruchomieniu. Obsługa awarii zazwyczaj działa najlepiej, gdy jest dostosowana jako część zamierzonej strategii serwisowej, decydując, co powinno być powtarzane, co powinno być latched, co powinno być rejestrowane, a co powinno szybko zawodzić, zamiast pozostawać jako domyślne wartości rejestru.
Koszt integracji, który obejmuje oprogramowanie, walidację i rzeczywistość debugowania
Koszt integracji rzadko kończy się na BOM i obszarze PCB. Obejmuje on prace związane z oprogramowaniem, zakres walidacji, czas testów, odporność na wytwarzanie i obciążenie debugowaniem, gdy coś nie działa zgodnie z oczekiwaniami. Wysoce zintegrowane PMIC mogą zmniejszyć liczbę komponentów, co jest atrakcyjne, ale koncentrują również ryzyko: późna korekta na jednym szynie może wywołać ponowną kwalifikację większej części drzewa zasilania, niż zespół planował.
Bardziej dyskretne podejścia mogą zwiększyć wysiłek związany z układem i zarządzaniem częściami, jednak mogą oferować modułowość i łatwiejszą substytucję, jeśli warunki łańcucha dostaw zmienią się lub oczekiwane są aktualizacje w trakcie życia. Bardziej uczciwym punktem widzenia jest apetyt na ryzyko programu: wrażliwość na harmonogram, oczekiwana liczba iteracji oraz jak często projekt jest prawdopodobnie rewidowany po pierwszym wydaniu.
Cechy cyfrowej mocy: elastyczność, która wiąże się z dodatkowymi wymaganiami
Telemetria, programowalne szyny i dynamiczne skalowanie napięcia mogą przynieść prawdziwe korzyści: ściślejszą optymalizację mocy, jaśniejsze diagnostyki awarii oraz adaptacyjne skalowanie wydajności, które dostosowuje się do obciążenia i temperatury. Jednocześnie te funkcje wprowadzają zależności od oprogramowania, kontrolę konfiguracji, dyscyplinę programowania produkcji oraz całkowicie nowe tryby awarii, które nie istnieją w prostszych konfiguracjach analogowych. Telemetria staje się wartościowa tylko wtedy, gdy zebrane dane są aktywnie wykorzystywane do monitorowania i podejmowania decyzji projektowych, zamiast pozostawać nieużywanymi na pulpitach diagnostycznych.
Z praktycznego punktu widzenia cyfrowa moc zarabia na swojej obecności, gdy zamyka mierzalną pętlę. Jeśli programowalność można wykorzystać do odzyskania wydajności, wydłużenia żywotności baterii lub zapobiegania ograniczeniom termicznym z kontrolowanymi politykami, staje się silnym narzędziem. Jeśli jest włączona po prostu dlatego, że jest dostępna, często przekształca się w nieużywaną powierzchnię konfiguracji, która komplikuje walidację, zwiększa ryzyko błędów w produkcji oraz tworzy niejasności co do tego, jakie ustawienia są naprawdę zamierzone.
Praktyczny proces wyboru i walidacji, który śledzi zachowanie systemu
Przepływ roboczy, który zwykle utrzymuje się pod presją, zaczyna się od celów zachowania systemu, a nie przeszukiwania katalogu PMIC i mając nadzieję, że dopasowanie zadziała później. Dzieli problem na konkretne, testowalne fragmenty i wymusza jasność co do tego, co oznacza dobre zachowanie przed uruchomieniem płyty.
• Przekształć transienty obciążeniowe w wymagania dla szyn (dopust na spadek, czas ustatkowania, prąd szczytowy, częstotliwość powtórzeń).
• Określ budżety hałasu dla wrażliwych bloków (ADC, PLL, SERDES, RF) i przemapuj je na ograniczenia falowania oraz założenia dotyczące układu.
• Określ sekwencjonowanie, zależności resetu oraz odnawianie w stanie awarii jako jedna maszyna stanów.
• Oceń ryzyko EMI wcześnie, wykorzystując realistyczne ograniczenia rozmieszczenia i przewidywaną metodę ekranowania.
• Waliduj zachowanie ochrony przy użyciu wstrzykiwania awarii, które przypomina rzeczywiste zwarcia, zdarzenia kablowe i opóźnienia baterii.
ADC / PLL / SERDES / RF
Taki styl podejścia redukuje późne niespodzianki, ponieważ traktuje PMIC jako mechanizm, który rządzi zachowaniem mocy na poziomie systemu, a nie jako narzędzie w tle. Gdy moc projektowana jest jako podsystem pierwszej klasy, wydajność staje się bardziej spójna, niezawodność łatwiejsza do obrony danymi, a prace związane z zgodnością mają tendencję do bycia bardziej przewidywalnymi, podczas gdy zespół spędza mniej czasu na ściganiu intermitentnych awarii, które pochodzą z szyn, a nie z logiki lub oprogramowania.
Przyszłe kierunki rozwoju PMIC
Wyższa gęstość mocy i niższe napięcia rdzenia sprawiają, że PMIC regulują z mniejszym zapasem elektrycznym i mniejszą tolerancją na opóźnienia. Gdy napięcia zasilania znajdują się bliżej minimalnego punktu roboczego obciążenia cyfrowego, nawet drobne spadki mogą objawić się jako błędy miękkie, resetowanie lub ograniczenie wydajności, które podczas uruchamiania systemu wydaje się „tajemnicze”. Stopniowo przesuwa to uwagę projektowania z tego, jak dokładnie wygląda napięcie w stanie ustalonym, na to, jak zachowuje się podczas najgorszych przypadków, w szybko zmieniających się zdarzeniach obciążeniowych.
Zespoły często napotykają niewygodną rzeczywistość: pętla, która wygląda spokojnie na stanowisku badawczym, może nadal źle działać w produkcie, gdy rzeczywiste obciążenia tworzą ostre skoki obciążenia, lokalne gorące punkty i nierównomierne dzielenie prądu fazowego. Bardziej odpornym wzorcem jest traktowanie projektowania pętli, wyborów stopni mocy i impedancji PDN jako jednego sprzężonego systemu, a następnie weryfikacja zachowania przy użyciu reprezentatywnych sygnatur obciążeń zamiast czystych, idealizowanych impulsów.
Szybsze transienty naturalnie kierują projekty w stronę ciaśniejszych pętli, jednak ciaśniejsze pętle również narażają projekty na indukcyjności pasożytnicze, nagromadzenia tolerancji i szumy pomiarowe, które łatwo jest niedoszacować na początku. W wielu programach różnica między stabilnością a stabilnością w terenie wynika z poprawionego modelowania małych sygnałów, wiarygodnego pomiaru prądu oraz kompensacji, która jest dostosowana z uwzględnieniem rzeczywistego układu.
Zwiększenie częstotliwości przełączania może pomóc, ale nie automatycznie przekłada się na lepsze zachowanie transientów, jeśli ścieżka pomiarowa i geometria PCB nie mogą wspierać zwiększonej szerokości pasma. Gdy taki niedopasowanie występuje, wzmocnienie pętli jest konsumowane na wzmacnianie szumów, co może objawić się jako skaczące przełączanie, słyszalne artefakty w niektórych trybach roboczych lub szczyty EMI, które pojawiają się dopiero po integracji mechanicznej.
Nowoczesne bloki obliczeniowe i komunikacyjne generują popyt, który jest wybuchowy i kompozytowy, więc walidacja transientów coraz bardziej odzwierciedla to, co robią rzeczywiście oprogramowanie i radia, a nie to, co może przybliżyć skrzynka obciążeniowa przy użyciu jednego kroku.
Wiele zespołów zbiega się w proces pracy, który łączy:
• kroki obciążenia w laboratorium
• dzienniki telemetrii platformy
• iteracyjne aktualizacje do wyborów kompensacji i odsprzęgania.
Podejście to ma tendencję do zmniejszania niespodzianek na późnym etapie, zwłaszcza gdy ograniczenia termalne powoli przekształcają zachowanie elektryczne i zmieniają marginesy w czasie.
Nacisk na redukcję rozmiaru przy jednoczesnym poprawianiu wydajności prowadzi do integrowania elementów w opakowaniu i otaczającej strukturze, a nie tylko w die. Zaawansowane opakowania i wbudowane pasywne mogą skrócić pętle o dużym di/dt, zredukować pasożytnicze i dopasować odpowiedź transientową w sposób, który wydaje się natychmiast mierzalny podczas debugowania. Zintegrowane magnetyki mogą dodatkowo zwiększyć gęstość mocy, ale korzyść jest często ograniczona przez ścieżki termalne, ograniczenia mechaniczne oraz to, jak sprzężenie zmienia się, gdy projekt znajduje się wewnątrz swojego rzeczywistego opakowania.
W produktach wdrożonych najtrwalsze zyski z integracji często pochodzą z redukcji wrażliwości na różnice w budowie i stabilizacji wydajności w całym rozkładzie produkcyjnym, a nie jedynie z cięcia kosztów materiałów.
Wybór opakowania coraz bardziej odzwierciedla wyniki elektryczne i termalne, w tym niższą indukcyjność pętli, poprawę rozprzestrzeniania ciepła i bardziej przewidywalną kontrolę impedancji. Powszechną lekcją w terenie jest to, że dwie płytki dzielące ten sam schemat mogą znacznie różnić się w zachowaniu, gdy jeden projekt zachowuje zwarte pętle prądowe, a drugi rozprasza ścieżkę mocy po PCB.
W miarę jak integracja systemu rośnie, planowanie układu często jest priorytetem wcześniej w rozwoju, ponieważ późniejsze zmiany komponentów nie zawsze mogą skorygować problemy spowodowane słabą geometrią lub trasowaniem PCB.
Zintegrowane magnetyki mogą zwiększać wydajność przy wyższych częstotliwościach i redukować wysokość z, co jest atrakcyjne w skompresowanych produktach. W tym samym czasie mogą wprowadzać nowe ścieżki sprzężenia i tworzyć gorące punkty termalne, które są trudne do wykrycia aż do późnych prototypów. Projekty, które przebiegają gładko, zazwyczaj traktują induktor i opakowanie jako wspólny temat współprojektowania EMI i termicznego, w tym decyzje dotyczące miejsca w pobliżu anten, linków o wysokiej prędkości i wrażliwych czujników.
Praktyka EMI zmierza w stronę strategii kontroli, które przewidują warunki pracy, a nie tylko czysto statycznych środków zaradczych. Technik, takich jak modulacja widma rozprzestrzenionego, inteligentniejsze sterowanie bramkami i bogatsze pomiary na chipie, mogą zmniejszać szczyty, ale wymagają również koordynacji, aby uniknąć po prostu handlowania emisjami szczytowymi na rzecz szumów szerokopasmowych lub zakłóceń radiowych.
Wiele zespołów widziało, jak ta sekwencja się rozwija: wczesne kontrole EMI przechodzą, a następnie późniejsze wersje nie powiodą się, gdy wiele regulatorów przełącza się w skorelowanych wzorcach, gdy nowy harmonogram oprogramowania zmienia czas pracy, lub gdy kable i osłony zmieniają ścieżki zwrotne. Te doświadczenia popychają myślenie EMI w górę do poziomu platformy, zamiast traktować każdy regulator jako izolowane pudełko.
W miarę jak przełączanie krawędzi staje się szybsze, kontrola dv/dt coraz bardziej wpływa zarówno na emisje, jak i długoterminowy stres. Napędy bramkowe dodają więcej programowalności, a logika ochrony staje się bardziej świadoma kontekstu, co sprawia, że strojenie przypomina bardziej inżynierię systemową niż wybór komponentów.
Praktycznym nawykiem, który oszczędza czas, jest dostrajanie szybkości krawędzi przy użyciu pomiarów dokonanych w finalnej konfiguracji mechanicznej, ponieważ ekranowanie, wiązki i struktury uziemiające często zmieniają wyniki EMI w sposób, którego gołe płytki nie ujawniają.
Ulepszona detekcja na chipie pozwala na adaptacyjne zachowania, takie jak przesunięcie zachowania przełączania, gdy emisje zbliżają się do limitu lub gdy zmienia się tryb pracy. Z upływem czasu, skłania to PMIC do odejścia od zachowania o ustalonej funkcji w kierunku zarządzanych podsystemów, które nieustannie negocjują wydajność, hałas i warunki termiczne w oparciu o informacje zwrotne, a nie założenia.
Systemy zasilane bateriami wciąż dążą do ultra-niskiego prądu spoczynkowego i wysokiej efektywności przy niskim obciążeniu, stosując techniki takie jak PFM/burst, emulacja diod oraz automatyczny dobór trybów. Emocjonalne napięcie, które wiele zespołów dostrzega, polega na tym, że te same tryby niskiego obciążenia, które wyglądają świetnie w karcie danych, mogą wprowadzać szumy, słyszalne artefakty lub przerywane sygnatury EMI, które są natychmiast zauważalne, nawet jeśli średnia wydajność wygląda doskonale.
Aby zmniejszyć niejasności, zespoły coraz częściej definiują, co oznacza akceptowalne zachowanie w trybie spoczynku w konkretnych warunkach, a następnie wybierają strategię trybów, aby dopasować się do tej definicji.
Powszechnie określane cele obejmują:
• Limity fal w trybie uśpienia/spoczynku
• Opóźnienie budzenia
• Ograniczenia akustyczne/hałas
• Zachowanie EMI podczas okresowych czynności serwisowych.
W praktyce, czas życia baterii w realistycznych cyklach pracy często opowiada historię bardziej wiarygodnie niż liczby dotyczące maksymalnej wydajności, szczególnie gdy cykl pracy obejmuje sen, okresowe budzenie, wybuchy radiowe i próbki z czujników.
Automatyczne przełączanie trybów jest atrakcyjne, ale przejścia mogą powodować krótkie zakłócenia, które znikają w uśrednionych pomiarach i objawiają się tylko jako rzadkie resetowania lub przerywane skargi na hałas. Projekty, które wydają się "solidne" w terenie, często spędzają dodatkowy czas na walidacji tuż na granicach między PFM a PWM, w tym sekwencje budzenia, opóźnienia sekwencyjne i kroki obciążenia w warunkach brzegowych.
Powtarzającym się wzorem jest to, że najbardziej agresywne ustawienie efektywności nie zawsze jest najwygodniejszym wyborem produktu, gdy generuje falowanie, które zmienia się w zależności od warunków lub sprzężenia hałasu, które trudno powtórzyć. Wiele zespołów kończy na wybieraniu konfiguracji, która rezygnuje z niewielkiej ilości efektywności w zamian za zachowanie, które jest powtarzalne w różnych temperaturach, wariacjach w budowie i scenariuszach, co często obniża ryzyko integracji i zmniejsza rotację wsparcia.
W miarę jak platformy obliczeniowe rosną, coraz bardziej polegają na dokładnej telemetrii, adaptacyjnym skalowaniu napięcia i ochronie skoordynowanej w wielu szynach. Telemetria odgrywa praktyczną rolę w codziennej inżynierii: może skrócić czas uruchamiania, przyspieszyć analizę przyczyn źródłowych i zmniejszyć pokusę nadprojektowania "na wszelki wypadek" poprzez ujawnienie, gdzie rzeczywiście znajduje się margines.
Telemetria ma tendencję do bycia najbardziej istotną, gdy warunki zmieniają się szybko, a nie gdy szyna jest stabilna i łatwa do zmierzenia. Przyszłe PMIC mają prawdopodobnie poprawić zachowanie próbkowania, wybory filtrów i synchronizację czasową, aby decyzje programowe bardziej dokładnie odzwierciedlały rzeczywistość.
Jedną z subtelności, które doświadczone zespoły mają tendencję do doceniania, jest to, że więcej próbek nie jest automatycznie bardziej użyteczne; spójność, stabilność kalibracji w zależności od temperatury oraz jasne definicje pasma i opóźnienia często decydują, czy dane można wykorzystać pewnie.
Większa liczba szyn wiąże się z większą potrzebą skoordynowanego zachowania ochrony, aby system reagował spójnie, a nie szyna po szynie.
Koordynacja ochrony często obejmuje:
• Zachowanie odpowiedzi OCP
• Zachowanie odpowiedzi OVP
• Zachowanie odpowiedzi UVP
• Zachowanie odpowiedzi OTP
• Zależności sekwencyjne
• Polityki odzyskiwania z błędów
• Współdzielenie statusu w PMICach
Rzeczywiste systemy często zawodzą nie dlatego, że brakuje jakiejś funkcji, ale dlatego, że szyny reagują różnie na ten sam event, produkując kaskady spadków napięcia lub pętle restartowe, które są frustrujące do diagnozowania. Skoordynowane podejście do obsługi błędów, współdzielony status oraz zjednoczony plan odzyskiwania lepiej odpowiada temu, jak platformy powinny się zachowywać pod stresem.
Przyjęcie GaN i SiC będzie rosło w obszarach, gdzie częstotliwość przełączania i wydajność zasadniczo zmieniają rozmiar lub parametry wydajności. Szybsze przełączanie może zmniejszać rozmiary elementów magnetycznych i poprawiać odpowiedź przejściową, jednak podnosi również stres związany z dv/dt, wrażliwość na EMI oraz wymagania dotyczące projektowania драйвов bramek i strategii izolacji. Ograniczenia nie są jedynie elektryczne; dotyczą także granic operacyjnych związanych z wariacjami produkcyjnymi i rzeczywistymi scenariuszami nadużycia, które zespoły nauczyły się traktować poważnie.
Rozwiązania GaN i SiC zazwyczaj wymagają precyzyjnej kontroli драйвów bramek, zdyscyplinowanego układu oraz schematów ochrony, które zapobiegają zbyt dużym impulsem, oscylacjom i niezamierzonym włączeniom. Praktyczny wniosek, który pojawia się wielokrotnie, to to, że jakość układu może dominować nad wyborem urządzenia; dobrze przeprowadzony układ z "umiarkowanym" urządzeniem może przewyższać wydajnością urządzenie premium umieszczone w hałaśliwej, indukcyjnej pętli.
W miarę wzrostu prędkości przełączania, wybory izolacyjne oraz ograniczenia długoterminowej niezawodności stają się bardziej wyraźne w przeglądach projektowych i planowaniu kwalifikacji. Przyjęcie zazwyczaj przyspiesza tam, gdzie zyski wydajności wyraźnie usprawiedliwiają zwiększony rygor projektowy, podczas gdy produkty wrażliwe na koszty lub hałas często poruszają się ostrożniej i wymagają wyraźniejszych dowodów korzyści na poziomie systemu.
PMIC stają się coraz bardziej zaprojektowane tak, aby działały jak wykonawcy polityki, którzy w czasie rzeczywistym rozstrzygają kwestie efektywności, hałasu, termiki i niezawodności. Architektury, które dobrze się starzeją, traktują energię jako zarządzany zasób: telemetry PMIC informuje politykę oprogramowania, a polityka oprogramowania z kolei dostosowuje tryby pracy PMIC oraz zachowanie zasilania. To zaciera granice między posiadaniem sprzętu a oprogramowaniem w sposób, który może wydawać się niekomfortowy na początku, jednak często przynosi korzyści, zmniejszając nakład marginów i poprawiając odporność pod rzeczywistymi obciążeniami.
Wnioski
Skuteczna ochrona obwodów zależy od więcej niż tylko dodania jednego elementu ochronnego. Niezawodne projekty wymagają odpowiedniej koordynacji między odprowadzaniem przepięć, ograniczaniem napięcia, ograniczaniem prądu, uziemieniem, układem i czasem awarii. Każde urządzenie ochronne ma swoje mocne strony i ograniczenia, dlatego wybór musi odpowiadać oczekiwanemu typowi awarii, poziomowi energii, szybkości reakcji i środowisku pracy. Dobrze zaplanowana strategia ochrony poprawia bezpieczeństwo, zmniejsza ryzyko awarii i wspiera długoterminową niezawodność w rzeczywistych systemach elektronicznych.
Najczęściej zadawane pytania (FAQ)
1. Dlaczego PMIC jest uważany za koordynator energetyczny na poziomie systemu, a nie tylko za regulator napięcia?
PMIC robi znacznie więcej niż tylko przekształca jedno napięcie w drugie. Zarządza tym, jak wiele szyn jest generowanych, sekwencjonowanych, monitorowanych, dystrybuowanych i chronionych w całym systemie. W praktycznych projektach PMIC koordynuje szyny procesora, zasilania pamięci, sekcje RF, czujniki i domeny peryferyjne, a także zajmuje się czasem uruchamiania, przywracaniem błędów, zdarzeniami termicznymi i sygnalizowaniem dobrego stanu zasilania. Ponieważ wszystkie te zachowania oddziałują podczas uruchamiania i działania w czasie rzeczywistym, PMIC często staje się jednym z głównych czynników kształtujących niezawodność i stabilność systemu.
2. Dlaczego awarie związane z PMIC często pojawiają się tylko pod rzeczywistymi obciążeniami, a nie podczas prostych testów laboratoryjnych?
Testy na stanowisku z statycznymi obciążeniami rzadko odtwarzają szybkie zachowanie przejściowe generowane przez nowoczesne procesory, nadajniki RF, ruch pamięci i wybuchy czujników. W realistycznych warunkach pracy szyny doświadczają nagłych skoków prądu, które ujawniają słabości w odpowiedzi przejściowej, parazytach PCB, strojeniu kompensacyjnym i stabilności sieci wyjściowej. PMIC może wydawać się stabilny podczas kontrolowanego testowania, ale później może wykazywać spadki, nadmiar, oscylacje lub błędy sekwencjonowania, gdy rzeczywiste obciążenia tworzą szybko zmieniające się zapotrzebowanie elektryczne.
3. Dlaczego sekwencjonowanie zasilania jest traktowane jako umowa na poziomie systemu, a nie jako prosta funkcja uruchamiania?
Wiele systemów cyfrowych wymaga specyficznych relacji czasowych między głównymi szynami, szynami pamięci, zasilaniami I/O, sygnałami resetu i domenami zawsze włączonymi. Jeśli szyny wzrastają w niewłaściwej kolejności lub z niewłaściwym czasowaniem, procesory, bloki pamięci SRAM oraz wysokospdowe interfejsy mogą wchodzić w niezdefiniowane stany pracy. Problemy te często powodują sporadyczne awarie uruchamiania, które pojawiają się tylko w ekstremalnych temperaturach, podczas brązowych sytuacji lub w warunkach gorącego podłączenia baterii. Odpowiednie sekwencjonowanie staje się zatem skoordynowaną umową między wymaganiami sprzętowymi, oprogramowaniem i krzemowymi, a nie funkcją ułatwiającą.
4. Dlaczego odpowiedź przejściowa PMIC może cicho ograniczać rzeczywistą wydajność CPU i GPU?
Nowoczesne procesory generują nagłe skoki prądu podczas pracy w trybie boost, obciążeń AI, burstów gier i aktywności radiowej. Jeśli PMIC nie może utrzymać stabilnego napięcia podczas tych zdarzeń, oprogramowanie układowe może skrócić czas boostu, obniżyć prędkość taktowania lub poszerzyć marginesy czasowe, aby zapobiec awariom. W wielu produktach ograniczenia w dostarczaniu energii cichą ozdobą ograniczają utrzymaną wydajność, mimo że sam procesor wydaje się być w stanie na papierze. Stabilna reakcja transientna często ma większy wpływ na użyteczną wydajność systemu niż specyfikacje szczytowej wydajności same w sobie.
5. Dlaczego szum przejściowy i szum przełączania z PMIC-y stwarzają problemy wykraczające daleko poza sam system zasilania?
Harmoniczne przełączania i szum szerokopasmowy mogą wprowadzać się do obwodów RF, referencji ADC, PLL, linków SERDES i wrażliwych ścieżek analogowych poprzez współdzieloną impedancję masy i parazytyki PCB. Nawet relatywnie niewielkie poziomy szumów mogą zmniejszać dokładność ADC, zwiększać szum fazowy, zawężać margines czasowy lub pogarszać niezawodność komunikacji wysokiej prędkości. Szyna, która wygląda na elektrycznie akceptowalną w izolacji, może powodować poważne problemy z integralnością sygnału po zintegrowaniu jej w gęstych systemach mieszanych sygnałów.
6. Dlaczego ograniczenia termiczne PMIC często definiują maksymalną utrzymaną wydajność obliczeniową?
W miarę wzrostu temperatury PMIC, wydajność maleje, a mechanizmy ochrony termicznej mogą zacząć zmniejszać dostępny prąd lub wywoływać reakcję foldback. W kompaktowych systemach lokalne gorące punkty w pobliżu procesorów, pamięci lub sekcji RF mogą zmusić PMIC do obniżenia temperatury długo przed osiągnięciem teoretycznych limitów elektrycznych. Z tego powodu zrównoważona wydajność systemu często zależy równie mocno od rozmieszczenia termicznego, rozprzestrzeniania miedzi i wyboru pakietu, jak od specyfikacji regulatorów.
7. Dlaczego inżynierowie często łączą konwertery buck z regulatorami LDO w wrażliwych projektach?
Konwertery buck zapewniają efektywne obniżenie napięcia dla torów wysokoprądowych, ale wprowadzają szum przełączania i EMI. LDO generują znacznie czystsze napięcie wyjściowe z mniejszym szumem, ale wydzielają więcej ciepła przy obniżaniu większych napięć. Powszechnym kompromisem jest użycie konwertera buck do efektywnego generowania pośredniej szyny, następnie LDO do oczyszczania końcowego wrażliwego zasilania analogowego lub RF. Ta kombinacja lepiej równoważy wydajność, zarządzanie termiczne i redukcję szumów niż poleganie na jakiejkolwiek topologii osobno.
8. Dlaczego polityka odpowiedzi na awarie PMIC jest uważana za część ogólnego doświadczenia produktu?
Zachowanie w przypadku awarii decyduje, czy produkt wyłącza się czysto, wchodzi w pętlę restartową, zwalnia w sposób zrównoważony, czy staje się niestabilny podczas abnormalnych warunków. Ochrona przed przeciążeniem, wyłączenie termiczne, obsługa niskiego napięcia i czas odzyskiwania bezpośrednio wpływają na to, jak doświadcza się awarii akumulatorów, problemów z kablami lub zdarzeń przeciążeniowych. Dobrze zaprojektowane polityki PMIC izolują awarie w sposób przewidywalny i odzyskują w kontrolowany sposób, zmniejszając złożoność serwisu i zapobiegając małym problemom przekształcając się w awarie systemowe.
9. Dlaczego nowoczesne PMIC coraz bardziej polegają na telemetrii i programowalnych politykach zasilania?
Nowoczesne systemy dynamicznie zmieniają obciążenie, stan termiczny, aktywność radiową i zachowanie ładowania w czasie rzeczywistym. Telemetria PMIC pozwala oprogramowaniu układowemu w sposób ciągły monitorować warunki szyn, zużycie prądu, temperaturę i zdarzenia awaryjne. Te dane umożliwiają adaptacyjne skalowanie napięcia, zarządzanie termiczne, inteligentne ograniczanie oraz skoordynowane decyzje dotyczące ochrony. Jednak programowalne systemy zasilania wprowadzają również nową złożoność walidacyjną, ponieważ nieprawidłowa konfiguracja oprogramowania układowego może prowadzić do awarii, które nie występują w stałych konstrukcjach analogowych.
10. Dlaczego przyszłe projekty PMIC zmierzają w kierunku "orkiestrowania energii" zamiast prostego przetwarzania energii?
Oczekuje się, że przyszłe PMIC będą coraz bardziej koordynować wydajność, termikę, zachowanie EMC, ochronę, skalowanie obciążenia, polityki ładowania i telemetrię systemową jednocześnie. Szybsze technologie przełączania, węższe marginesy napięcia i wysoce dynamiczne obciążenia wymagają, aby PMIC ciągle dostosowywał swoje zachowanie w oparciu o rzeczywiste warunki eksploatacji, a nie statyczne założenia. Ta ewolucja przekształca PMIC w aktywny podsystem zarządzania, który ściśle współpracuje z oprogramowaniem układowym i oprogramowaniem systemowym, aby utrzymać stabilne, efektywne i przewidywalne działanie platformy w zmieniających się warunkach.
Powiązany blog
-
Ile zer na milion, miliard, bilion?
![Ile zer na milion, miliard, bilion?]()
2024/07/29
Million reprezentuje 106, łatwo chwytana liczba w porównaniu do przedmiotów codziennych lub rocznych pensji. Miliard, równoważny 109, zaczyna roz... -
IRLZ44N MOSFET Arkusz, obwód, równoważny, pinout
![IRLZ44N MOSFET Arkusz, obwód, równoważny, pinout]()
2024/08/28
IRLZ44N to szeroko stosowany Mosfet Power N-Kannel.Znany z doskonałych możliwości przełączania, jest bardzo odpowiedni do wielu zastosowań, szcz... -
Temperatura akumulatora zbyt niska, ładowanie zatrzymało się.Jak to naprawić?
![Temperatura akumulatora zbyt niska, ładowanie zatrzymało się.Jak to naprawić?]()
2024/10/6
Problemy z ładowaniem baterii telefonu komórkowego są powszechne, ale można je skutecznie zarządzać.Temperatura odgrywa dużą rolę w wydajnoś... -
BC547 Tranzystor Kompleksowy przewodnik
![BC547 Tranzystor Kompleksowy przewodnik]()
2024/07/4
Tranzystor BC547 jest powszechnie stosowany w różnych zastosowaniach elektronicznych, od podstawowych wzmacniaczy sygnałowych po złożone obwody o... -
Kompleksowy przewodnik po SCR (prostownik kontrolowany krzem)
![Kompleksowy przewodnik po SCR (prostownik kontrolowany krzem)]()
2024/04/22
Kontroli prostownicy (SCR) lub Thyristors odgrywają kluczową rolę w technologii elektroniki energetycznej ze względu na ich wydajność i niezawod... -
LR621, SR621SW, 364, AG1 Equivivalents i zamienniki
![LR621, SR621SW, 364, AG1 Equivivalents i zamienniki]()
2024/07/15
Baterie przycisków LR621 i SR621SW są powszechne w kompaktowych urządzeniach elektronicznych, takich jak zegarki, małe zabawki, kalkulatory i zdal... -
Podstawy obwodów OP-AMP
![Podstawy obwodów OP-AMP]()
2023/12/28
W skomplikowanym świecie elektroniki podróż do jej tajemnic niezmiennie prowadzi nas do kalejdoskopu komponentów obwodów, zarówno wykwintnych, j... -
Kompletny przewodnik po multiplekserach i ich rola w systemach cyfrowych
![Kompletny przewodnik po multiplekserach i ich rola w systemach cyfrowych]()
2025/09/20
Multipleksery są komponentami w systemach cyfrowych, zaprojektowanych do kierowania wieloma sygnałami wejściowymi do pojedynczej linii wyjściowej ... -
Porównanie różnic i zastosowań NMOS i PMOS
![Porównanie różnic i zastosowań NMOS i PMOS]()
2024/11/15
Zrozumienie różnic między tranzystorami NMOS i PMO jest ważne w projektowaniu wydajnych obwodów.NMOS (NMOS-semiconductor) i PMOS (typ p-tlenku-tl... -
CR2450 vs CR2032 Porównanie: Wszystko, co musisz wiedzieć
![CR2450 vs CR2032 Porównanie: Wszystko, co musisz wiedzieć]()
2025/09/15
Baterie guzików, takie jak CR2450 i CR2032, zasilają wiele codziennych elektroniki, od zegarków i pilotów po urządzenia medyczne i przemysłowe.C...










Gorące części
- K4S511632B-TC75
- M52067FP
- RC82573L
- ACPM-9007-BLK
- ICS950812CGLF
- M28W800CB70ZB6
- IDT71V321L55PFI
- 08051A270FAT2A
- CL05B473KO5NNND
- HD6432635UA81FJ
- LX62UL256SC-45
- UVR1H470MED1TD
- MC14495P1
- AD5258BRMZ10
- CM200YE4-12F
- RN73C1E10K7BTDF
- MT89L80AP1
- XC9536PC44AEM-15C0001
- DMN2046U-7
- CXB1443R-T4
- NT7167FG-00033
- CY7C68013A-128AXC
- SN74LVC2244ADGVR
- 74ACT843SPC
- RT1206DRD071KL
- NC7SZ332L6X
- LC1117CLTR18
- A42MX16-TQG176
- HY5DU283222AF-28
- M82520-14
- VI-2W0-CW/F1
- PI5A126U
- 06033A100JAT4A
- TAJT105M020RNJ
- XZFABBA10A
- LM1117IMP-5.0/NOPB
- ADE7878AACPZ-RL
- TLV320AIC24KIPFB
- AM3352BZCEA60
- STD4NK50ZT4
- T495D226M020ZTE200
- ICS1562BMLF
- K3RG4G40MM-MGCJT00E
- LCMX02-7000HC-4FG484I
- MC74HC4052AG
- UPD65029GD-083-5BB
- LM66100DCK
- SN27546YPHR.B1
- GLS85LS1002P-S-I-FZJE-TT095
- TPS826711SIP