- polski
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Zasady działania falowników o zmiennej częstotliwości, metody sterowania i zastosowania
Katalog
Przegląd falownika o zmiennej częstotliwości (VFD)
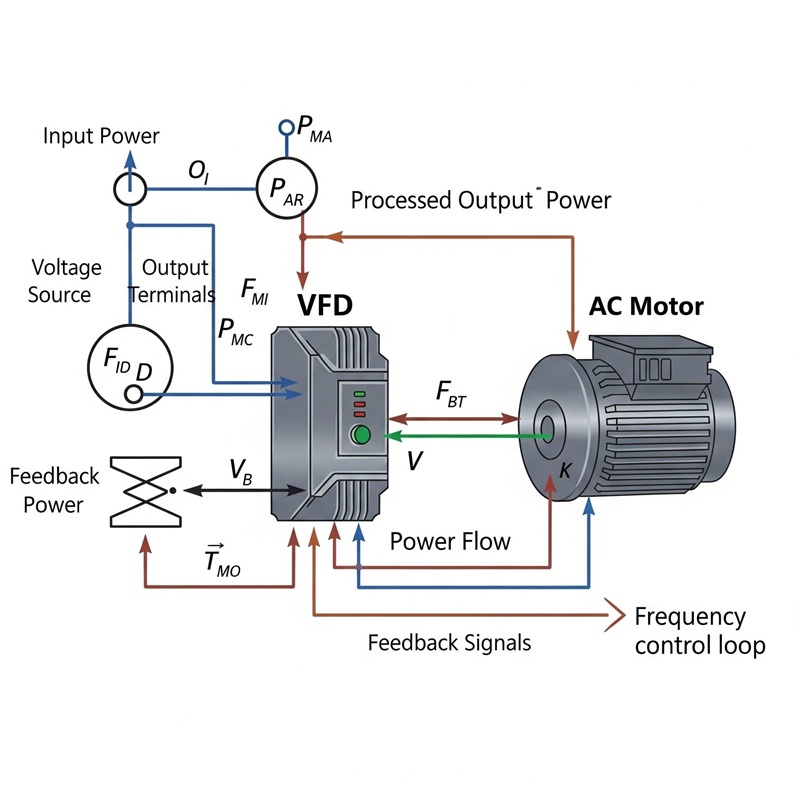
Falownik o zmiennej częstotliwości (VFD) to kontroler elektroniki mocy, który reguluje prędkość i moment obrotowy silnika AC poprzez dostosowanie częstotliwości elektrycznej statora, jednocześnie koordynując napięcie i prąd wyjściowy, aby strumień magnetyczny silnika i prąd wytwarzający moment obrotowy pozostały w wykonalnym zakresie pracy. Na podłodze zakładu częściej ujawnia się jako zdyscyplinowany regulator momentu i prądu, który przypadkowo generuje żądaną prędkość, gdy warunki elektryczne na zaciskach silnika są utrzymywane pod kontrolą.
Dla większości silników AC częstotliwość elektryczna w dużej mierze określa prędkość wirującego pola magnetycznego oraz prędkość silnika, a poślizg silnika indukcyjnego tworzy małą różnicę między nimi. W miarę zmiany częstotliwości, napęd dostosowuje napięcie, aby utrzymać odpowiedni strumień magnetyczny. Zbyt mały strumień może zmniejszyć moment obrotowy i reakcję, podczas gdy zbyt duży strumień może zwiększyć prąd, ciepło i hałas.
Wiele nowoczesnych napędów również bezpośrednio kontroluje prąd silnika, aby utrzymać stabilny moment obrotowy w niskich prędkościach, podczas nagłych zmian obciążenia lub gdy charakterystyki silnika zmieniają się z powodu wahań temperatury.
W trakcie uruchamiania i rozwiązywania problemów często można odnieść wrażenie, że kontrola częstotliwości powinna wyjaśniać wszystko, aż pierwsze szybkie przyspieszenie, nagłe zwolnienie lub wstrząs obciążenia ujawnią luki. Różnice w wydajności między napędami często ujawniają się w jakości pomiaru prądu, dostrajaniu pętli prądowej i w sposobie, w jaki napęd zarządza chwilowymi zmianami, a nie w samej podstawowej komendzie częstotliwości.
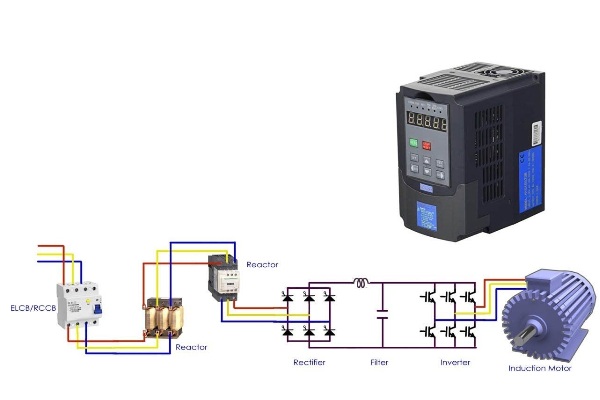
Większość przemysłowych VFD wykorzystuje strukturę AC–DC–AC, ponieważ zazwyczaj jest solidna, oszczędna i dostosowująca się do szerokiej gamy typów silników i profili pracy.
Prostownik przedni przekształca przychodzące AC w DC. Najpopularniejszą realizacją w systemach trójfazowych jest mostek z 6 diod. Przybliżony poziom bezobciążeniowy szyny DC wynosi:
VDC ≈ 1.414 × VLL
Przykłady często spotykane w pomiarach w terenie:
• 380 VAC trójfazowe → ~537 VDC
• 220 VAC jednofazowe → ~311 VDC
Mostek diodowy jest prosty i niezawodny, ale pobiera prąd niesinusoidalny z linii zasilającej, co może generować harmoniczne i zwiększać obciążenie na słabych systemach zasilania. W niektórych instalacjach problemy takie jak niepożądane wyłączniki, nagrzewanie transformatorów lub niestabilna praca mogą być spowodowane interakcją między prądami harmonicznymi a impedancją linii, a nie samym silnikiem.
Często stosowane opcje łagodzenia w panelach przemysłowych:
• Reaktory linii (dławiki AC)
• Dławiki w łączniku DC
• Filtry EMI/RFI
Alternatywy prostowników niekiedy wybierane dla specyficznych zachowań:
• Prostowniki SCR (tyristorowe) do ograniczonego kontrolowanego ładowania (teraz rzadziej spotykane w nowych budynkach)
• Aktywne fronty (AFE) wykorzystujące IGBT do poprawy współczynnika mocy, redukcji harmonicznych i umożliwienia regeneracji do sieci
Praktyczny sposób na określenie decyzji dotyczącej prostownika polega na tym, że definiuje on, jak napęd współdziała z systemem zasilania. Zaskakująca liczba problemów, które początkowo przypisywane były silnikom, ostatecznie okazuje się być związana z kompatybilnością po stronie wejściowej i warunkami linii.
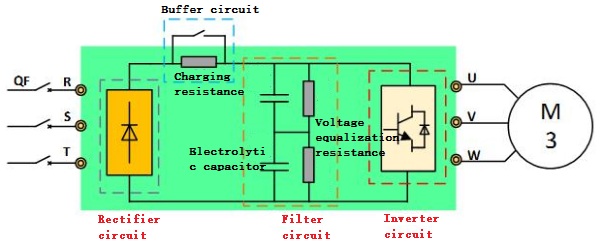
Podczas energizacji, kondensatory w sieci DC początkowo wyglądają jak bliskie zwarcie. Bez kontroli prądu rozruchowego, prostownik i zabezpieczenie upstream mogą doświadczyć nagłego wzrostu prądu, który przypomina mocne uderzenie w system. Większość napędów rozwiązuje to za pomocą ścieżki wstępnego ładowania, która ogranicza prąd podczas ładowania szyny, a następnie przechodzi do normalnej pracy.
Typowe elementy wstępnego ładowania:
• Opornik szeregowy w szynie DC podczas uruchamiania
• Styk bypass lub przekaźnik, który zamyka się po wzroście napięcia kondensatora
W rzeczywistych instalacjach błędy wstępnego ładowania często objawiają się jako przerywane awarie uruchamiania, alarmy o czasie ładowania lub szumy styku. Typowe przyczyny to starzejące się oporniki wstępnego ładowania, zużyte styki bypass i warunki niskiego napięcia podczas uruchamiania, które uniemożliwiają napędowi prawidłowe zakończenie procesu ładowania.
Sieć DC wygładza szum prostownika i zapewnia krótkoterminowe magazynowanie energii, gdy obciążenie zmienia się szybciej, niż źródło jest w stanie zareagować. Zazwyczaj obejmuje wiele elementów, z których każdy pełni inną rolę, a nie jedną „część naprawia wszystko” rozwiązanie.
Typowe komponenty sieci DC:
• Kondensatory elektrolityczne
• Oporniki rozładowujące i/lub wyrównujące
• Czasami kondensatory foliowe do tłumienia szumów wysokoczęstotliwościowych
Dla wyższych napięć szyny kondensatory mogą być połączone szeregowo. Ponieważ rzeczywiste kondensatory nie dzielą napięcia idealnie, dodaje się oporniki wyrównujące, aby zredukować nierównomierny rozkład napięcia, co przyspiesza starzenie i może doprowadzić jeden kondensator do wczesnego trybu awaryjnego. W trakcie eksploatacji, napęd może nadal działać z obniżoną pojemnością, co może być myląco uspokajające; wtedy zaczyna reagować ostrzej na spadki napięcia w sieci, zdarzenia regeneracyjne lub szybkie zmiany obciążenia. Ta zmiana w „tolerancji” często stanowi pierwszą wskazówkę, że stan zdrowia sieci DC się pogarsza.
W wielu miejscach zestaw kondensatorów sieci DC osiąga koniec życia szybciej niż IGBT, nie dlatego, że projekt jest zły, ale dlatego, że ciepło i stres związany z prądem szumowym kumulują się cicho w czasie. Dlatego zarządzanie przepływem powietrza, ograniczanie w wysokich temperaturach otoczenia oraz umiarkowane wybory częstotliwości nośnej często zwracają się w postaci mniejszej liczby nieuzasadnionych awarii i mniejszej liczby remontów napędów w średnim okresie eksploatacji.
Mostek inwertera syntezujе kontrolowane trójfazowe wyjście z szyny DC, powszechnie wykorzystując IGBT sterowane PWM. Diody antyrównoległe wzdłuż IGBT zapewniają ścieżkę prądu podczas przejść przełączania i wspierają ciągłość prądu, gdy indukcyjność silnika „domaga się” utrzymania przepływu prądu.
PWM umożliwia ścisłą kontrolę, ale także wytwarza szybkie krawędzie napięcia (wysokie dV/dt). Podnoszenie częstotliwości przełączania (nośnej) często redukuje hałas akustyczny i prąd szumowy, jednocześnie zwiększając straty przełączania i wewnętrzne ogrzewanie. W praktyce ustawienia wiążą się z kompromisami, które operatorzy mogą odczuć natychmiast, cisza po stronie silnika w porównaniu do marginesu temperatury wewnątrz napędu.
Typowe kompromisy operacyjne:
• Niższa częstotliwość nośna: chłodniejszy napęd, więcej hałasu akustycznego silnika i prąd szumowy
• Wyższa częstotliwość nośna: ciszej działający silnik, cieplejszy napęd, większe obciążenie komponentów w czasie
Długość kabla i wiek silnika mogą wpływać na wymagania dotyczące wyjścia w sposób, który zaskakuje osoby, które tylko patrzą na moc znamionową na tabliczce. Długie przewody i starsze systemy izolacyjne mogą wymagać dodatkowych działań.
Typowe dodatki i praktyki po stronie wyjścia:
• Filtry dV/dt lub filtry sinusoidalne
• Odpowiednie uziemianie oraz praktyki używania kabli ekranowanych w celu redukcji prądów łożyskowych i problemów z EMI
Gdy silnik zwalnia lub obciążenie napędza silnik (stan przesterowania), maszyna może generować moc z powrotem do szyny DC. Napięcie szyny rośnie, a napęd musi skierować lub rozproszyć tę energię, aby uniknąć wyzwolenia nadciśnienia DC. To jedno z tych zachowań, które mogą wydawać się losowe, dopóki przepływ energii nie zostanie jasno uwzględniony: inercja i wybory profilu prędkości często dominują nad wynikiem.
Typowe metody stosowane do obsługi energii regeneracyjnej:
• Hamowanie dynamiczne (rozdrabniacz hamulca + opornik): przekształca energię regeneracyjną w ciepło; szeroko stosowane, ponieważ zachowanie jest przewidywalne, a sprzęt jest prosty
• Regeneracyjny front (AFE lub oddzielny jednostka regeneracyjna): zwraca energię do sieci; często wybierane, gdy hamowanie jest częste lub gdy odzyskiwanie energii jest zgodne z celami działania
• Dłuższe rampy zwalniania: zmniejsza szczytową moc regeneracyjną; czasami wystarczająco, aby uniknąć dodawania sprzętu hamulcowego
W rozwiązywaniu problemów, przerywania z powodu nadmiaru napięcia DC często ustają po złagodzeniu czasu spowolnienia lub gdy hardware hamulcowy jest dopasowany do rzeczywistej bezwładności. To, co często bywa pomijane, to jak agresywnie skonfigurowany jest profil prędkości w odniesieniu do energii mechanicznej zgromadzonej w ładunku.
Kontrola VFD obejmuje różne metody, od prostych podejść skalarowych po szybkie metody regulacji prądu. "Odczuć" maszyny, szczególnie przy niskich prędkościach lub podczas skoków obciążenia, w dużej mierze zależy od tego, która rodzina kontrolna jest używana oraz jak dobrze model silnika pasuje do rzeczywistości.
V/Hz utrzymuje przybliżony stały stosunek napięcia do częstotliwości. Często jest to wygodne rozwiązanie dla wentylatorów i pomp, gdzie zapotrzebowanie na moment obrotowy jest dość przewidywalne, a dynamika jest umiarkowana. Tam, gdzie pokazuje swoje ograniczenia, to sztywność momentu obrotowego przy niskich prędkościach i reakcja podczas nagłych zmian obciążenia, gdzie system może wydawać się nieco niejasny lub opóźniony.
Kontrola wektorowa (FOC) i DTC wykorzystują pomiar prądu/napięcia oraz szybkie obliczenia (CPU/DSP) do regulacji komponentów prądu wytwarzającego strumień i moment obrotowy. Rezultatem jest bardziej pewna reakcja momentu obrotowego, szczególnie blisko zerowej prędkości i podczas szybkich transjentów, a regulacja prędkości poprawia się jeszcze bardziej, gdy używa się sprzężenia zwrotnego z enkodera.
Powszechnie występujące wyniki wydajności związane z tymi metodami:
• Silniejsze zachowanie momentu obrotowego przy niskiej prędkości
• Szybsza reakcja na zmiany obciążenia
• Precyzyjniejsza regulacja prędkości, szczególnie z wykorzystaniem sprzężenia zwrotnego z enkodera
W wielu instalacjach proces automatycznego strojenia pomaga poprawić wydajność poprzez dopasowanie modelu kontrolnego do rzeczywistych właściwości elektrycznych silnika, zamiast polegać na domyślnych wartościach parametrów. Często prowadzi to do dokładniejszej i bardziej stabilnej kontroli silnika.
VFD zmienia więcej niż tylko RPM. Wpływa na zachowanie termiczne silnika, wzorce obciążenia mechanicznego oraz jakość mocy wyżej, a te efekty uboczne mają tendencję do ujawniania się po zniknięciu nowości zmiennych prędkości.
Powszechnie pomijane skutki na poziomie systemu:
• Chłodzenie silnika przy niskiej prędkości: wentylatory wałów poruszają mniej powietrza; stały moment obrotowy przy niskiej prędkości może wymagać osobno zasilanego dmuchawy lub silnika o klasie napięcia do falowników
• Wzorce stresu mechanicznego: płynniejsza akceleracja może zmniejszyć obciążenia szokowe, podczas gdy agresywne limity momentu obrotowego mogą przyczynić się do poślizgu paska, stresu sprzęgła lub rezonansu
• Jakość mocy: diodowe fronty wprowadzają harmoniczne; wiele napędów na wspólnym źródle może wymagać skoordynowanej redukcji
• Ochrona i bezpieczeństwo: zintegrowane wykrywanie usterek (przeciążenie, nad/niż napięcie, nadmierna temperatura, zwarcie doziemne) oraz funkcje takie jak Bezpieczny Moment Wyłączony (STO) zmieniają sposób, w jaki systemy są okablowane, zatwierdzane i konserwowane
Stabilne wyniki rzadko osiąga się, zostawiając wszystko na ustawieniach domyślnych i mając nadzieję, że proces będzie łagodny. Przewidywalność zazwyczaj pochodzi z krótkiego, metodycznego rytmu ustawień, mniej dramatycznego niż heroiczne rozwiązywanie problemów, ale znacznie bardziej satysfakcjonującego, gdy maszyna działa płynnie z zmiany na zmianę.
Lista kontrolna ustawień, która często przynosi korzyści podczas uruchamiania:
• Wprowadź dokładne dane tabliczki znamionowej silnika (napięcie, prąd, częstotliwość, prędkość i współczynnik mocy, jeśli napęd o to prosi)
• Wybierz tryb kontroli, który odpowiada profilowi obciążenia (wentylator/pompa, stały moment obrotowy lub wysoka dynamika)
• Ustaw akcelerację/decelerację na podstawie bezwładności i możliwości hamowania, a nie osobistych preferencji
• Wybierz częstotliwość nośną, która odzwierciedla zarówno oczekiwania co do hałasu, jak i rezerwy cieplnej
• Zweryfikuj praktyki uziemienia, typ kabla i długość kabla przed poszukiwaniem przerywanych lub "widmowych" usterek
Produktowny model mentalny to traktowanie VFD jako systemu kierującego energią z trzema wyraźnymi zadaniami: kształtowanie mocy wejściowej po stronie linii, buforowanie energii w łączu DC oraz regulacja prądu silnika po stronie wyjściowej. Kiedy ten przepływ jest na uwadze, pojawiające się problemy, takie jak przerywania z powodu nadmiaru napięcia DC, słaby moment obrotowy przy niskich prędkościach, uciążliwe usterki i wczesne starzenie się komponentów, stają się łatwiejsze do wyjaśnienia, przetestowania i poprawienia.
Klasyfikacja VFD
Według architektury etapu zasilania
Napędy VSI są szeroko stosowane w systemach przemysłowych, ponieważ topologia jest prosta i praktyczna. Napęd przekształca wejście AC w szynę DC za pomocą mostka diodowego lub aktywnego frontu, a następnie wykorzystuje falownik do generowania mocy o zmiennej częstotliwości i zmiennym napięciu dla silnika. Duże kondensatory w szynie DC pomagają utrzymać stabilne zasilanie napięciowe i redukować wahania napięcia spowodowane zmianami obciążenia.
W codziennej pracy uruchamiania ta architektura zwykle jest wyrozumiała dla
typowych obciążeń zmiennego momentu obrotowego, takich jak pompy i wentylatory, co jest powodem, dla którego często pozostawia dobre pierwsze wrażenie w terenie. Jednocześnie połączenie sztywnej szyny i szybkie krawędzie przełączania mogą podnosić dv/dt na zaciskach silnika, a ta rzeczywistość staje się trudna do zignorowania, gdy długość przewodów silnikowych staje się duża lub gdy starsze systemy izolacyjne już żyją na zapas.
Wspólne szczegóły uruchomieniowe, które regularnie decydują o tym, czy instalacja VSI wydaje się schludna, czy chaotyczna:
• Długość i prowadzenie kabla silnikowego
• Metoda uziemienia i jakość połączeń
• Strategia filtracji dv/dt lub sinusoidalnej
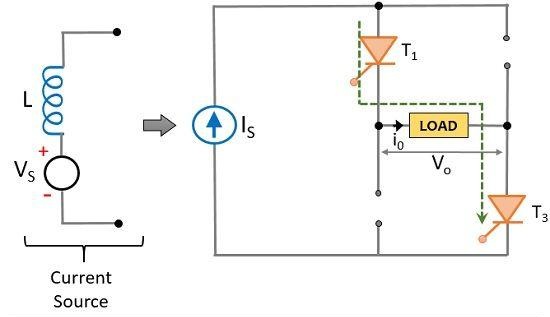
Napędy CSI zajmują inne stanowisko: duża indukcyjność w łączniku DC przesuwa system w kierunku stosunkowo stałego prądu DC, a etap wyjściowy kształtuje prąd silnika odpowiednio. Są rzadziej specyfikowane dzisiaj, ale nadal pojawiają się w środowiskach o dużej mocy, średnim napięciu i dużym obciążeniu, gdzie kontrolowane zachowanie prądu pasuje do profilu ryzyka i kultury operacyjnej zakładu.
W praktyce, CSI zazwyczaj wymienia wygodę na przewidywalność. Wymiary sprzętowe są większe, przestrzeń konfiguracyjna może wydawać się węższa, a ekosystem dostępnych części i techników jest mniejszy niż oczekują większość zespołów z VSI. Niemniej jednak, w przypadku aplikacji, które odpowiadają mocnym stronom CSI, stabilniejsze zachowanie prądu może być pocieszające, szczególnie gdy miejsce ceni konserwatywne obciążenie elektryczne i trwałą pracę nad kompaktowością.
Typowe kompromisy CSI, które kształtują rzeczywiste projekty:
• Większy rozmiar fizyczny i wyższa złożoność systemu
• Mniej opcji serwisowych i części zamiennych z głównego nurtu
• Silne dostosowanie do pewnych zastosowań średniego napięcia i dużego obciążenia
Dyskusje o napędach często koncentrują się na inwerterze, ale to front końcowy często decyduje o tym, jak system zachowuje się na magistrali zakładowej i podczas hamowania. Diodowy front końcowy jest prosty i przyjazny dla budżetu, ale pobiera prąd wejściowy nienaładowany i z reguły nie może oddać energii do sieci. Aktywny front końcowy może poprawić współczynnik mocy wejściowej, zredukować harmoniczne i wspierać regenerację.
Ta różnica staje się boleśnie oczywista w procesach z częstym spowolnieniem lub przegubowymi obciążeniami. Kiedy maszyna wielokrotnie wyłączy się z powodu przetężenia na magistrali DC podczas szybkich zatrzymań, łatwo jest obwinić strojenie, ale niewygodna prawda często wiąże się z niedopasowaniem w zarządzaniu energią: energia wraca szybciej, niż system może ją wchłonąć lub oddać.
Opcje frontowe i zarządzania energią powszechnie wybierane w terenie:
• Diodowy front końcowy
• Aktywny front końcowy
• Opornik hamujący / dynamiczny tłumik hamujący
• Jednostka regeneracyjna lub wspólne rozwiązania magistrali DC
• Dłuższy ramp spowolnienia dostosowany do tolerancji procesu
Klasyfikacja według metody przełączania i modulacji
Starsze napędy czasami polegają na strategiach modulacji PAM lub wcześniejszych związanych z urządzeniami mocy z minionej epoki i sprzętem kontrolnym. Te systemy nadal występują w długożyjących urządzeniach i mogą działać niezawodnie, aż do momentu, gdy wsparcie cyklu życia zaczyna przypominać zgadywanie. W porównaniu z nowoczesnymi podejściami PWM zazwyczaj ustępują efektywności, zachowaniu akustycznemu i możliwości kontrolowania.
Z punktu widzenia konserwacji, emocjonalny "punkt nacisku" rzadko dotyczy wydajności, lecz niepewności. Kiedy elementy zamienne stają się rzadkie, a dokumentacja skąpa, planowanie modernizacji zazwyczaj koncentruje się na migracji do współczesnych napędów PWM, z zachowaniem szacunku dla istniejących silników, kabli i ograniczeń procesowych.
PWM jest nowoczesnym domyślnym rozwiązaniem, ponieważ oferuje elastyczną kontrolę napięcia i częstotliwości oraz wspiera tryby sterowania, które większość zespołów oczekuje dzisiaj. PWM wektora przestrzennego jest szeroko stosowany, ponieważ poprawia wykorzystanie magistrali DC i może zmniejszyć zniekształcenia harmoniczne w prądzie silnika.
Jednym z operacyjnych szczegółów, które doświadczeni technicy uczą się traktować z pokorą, jest to, że jakość fali PWM zawsze wiąże się z kosztami. Czystszy prąd zazwyczaj wymaga większej aktywności przełączania, co podnosi straty przełączania i obciążenie cieplne. Najlepsze rezultaty zazwyczaj pochodzą z równoważenia częstotliwości nośnej, przestrzeni cieplnej i celów hałasu akustycznego, a nie z goni za jednym najlepszym ustawieniem pokrętła.
Typowe lewary konfiguracyjne PWM, które są rutynowo wymieniane:
• Częstotliwość nośna
• Rezerwa cieplna i zdolność radiatora/wiatraka
• Oczekiwania dotyczące hałasu akustycznego
• Tolerancja fal prądu silnika i momentu obrotowego
Zwiększenie częstotliwości nośnej często zmniejsza falowanie prądu i może przesunąć hałas przełączania ponad najbardziej wrażliwy zakres akustyczny. W zajętych przestrzeniach ta zmiana może być odczuwana jako ulga, a w niektórych maszynach bezpośrednio poprawia postrzeganą jakość produktu.
Ograniczeniem jest zarządzanie ciepłem. Wyższa częstotliwość przełączania zwiększa straty inwertera, co może skłonić napęd do deratyzacji, silniejszego przepływu powietrza w obudowie lub większych rozmiarów ramy. Wiele skarg w terenie, które jawią się jako "tajemnicze przegrzewanie", staje się znacznie mniej tajemnicze, gdy częstotliwość nośna, temperatura otoczenia, ograniczenie obudowy i cykl pracy są oceniane razem.
Rozwiązania związane z ciepłem często stosowane w celu stabilizacji ustawień o wysokiej częstotliwości nośnej:
• Zmniejszyć częstotliwość nośną do realistycznego poziomu dla cyklu pracy
• Zredukować prąd wyjściowy i zrewidować oczekiwania dotyczące przeciążenia
• Popraw wentylację obudowy lub ścieżkę odprowadzania ciepła
• Przenieś się do większego rozmiaru ramy napędu
Napędy VFD średniego napięcia często wykorzystują topologie falowników wielopoziomowych, aby zredukować kroki napięcia i poprawić jakość przebiegu. Urządzenia o szerokiej bandgap, takie jak SiC i GaN, mogą przełączać się szybciej i bardziej efektywnie, co może wydawać się techniczną wygraną, aż do momentu, gdy szybkie krawędzie podnoszą stres dv/dt i zakłócenia elektromagnetyczne w układach, które nie są realizowane w sposób zdyscyplinowany.
Praktyczny sposób myślenia o tym polega na tym, że szybsze przełączanie może poprawić kontrolowalność, jednocześnie sprawiając, że szczegóły instalacji są bardziej widoczne. Kiedy łożyska silnika wykazują wczesne zużycie lub gdy czujniki zaczynają działać hałaśliwie, przyczyną często jest napięcie wspólne oraz praktyki przewodzenia/uziemienia, a nie jakiekolwiek niedobory w algorytmie sterowania.
Elementy instalacji i łagodzenia, które często decydują o wynikach w przypadku szybkich krawędzi:
• Wybór kabla silnikowego i podejście do ekranowania
• Topologia uziemienia i połączeń
• Filtry wyjściowe dv/dt lub filtry sinusoidalne
• Łagodzenie prądów łożyskowych
• Uważny układ EMI i separacja przewodów sygnałowych/mocowych
Klasyfikacja według filozofii sterowania
Sterowanie V/Hz utrzymuje relację napięcia do częstotliwości, która utrzymuje strumień silnika w wykonalnym zakresie. Jest proste, stabilne w wielu instalacjach i szeroko stosowane w ładunkach o zmiennym momencie, takich jak wentylatory i pompy odśrodkowe.
Podejście to zwykle sprawdza się, gdy proces nie wymaga ścisłej kontroli momentu przy bardzo niskiej prędkości. W praktyce często odnosi sukcesy, ponieważ redukuje wysiłek dostrajania i obniża szansę na oscylacje spowodowane nieprawidłowymi parametrami silnika. Kompromis to umiarkowana dynamika odpowiedzi, szczególnie podczas szybkich zmian obciążenia, gdzie proces żąda, a napęd odpowiada z opóźnieniem.
Sterowanie wektorowe oddziela komponenty generujące moment i strumień, poprzez szacowanie lub pomiar stanów silnika. Sterowanie wektorowe bezczujnikowe może działać zaskakująco dobrze bez enkodera, ale mocno opiera się na dokładnych danych silnika i rozsądnie stabilnych warunkach pracy. Sterowanie wektorowe w zamkniętej pętli dodaje enkoder lub rezolwer, co zazwyczaj poprawia zachowanie momentu w niskich prędkościach, dokładność i odpowiedź transjentową.
W praktyce wiele problemów związanych z kontrolą wektorową ma swoje źródło w parametrach, a nie w teorii. Dane z tabliczki znamionowej są często punktem wyjścia, a nie linią mety. Krótkie uruchomienie identyfikacyjne, sensowne wybory częstotliwości podstawowej i realistyczne limity prądowe często przekształcają napęd, który wydaje się miękki, w taki, który utrzymuje prędkość i moment w sposób, któremu operatorzy mogą zaufać.
Elementy ustawienia kontroli wektorowej, które często decydują o wydajności:
• Zweryfikowane dane tabliczki znamionowej silnika
• Wyniki identyfikacji silnika/autostrojenia i ich prawdopodobieństwo
• Wybór częstotliwości podstawowej zgodny z projektowaniem silnika
• Limity prądowe i momentowe dostosowane do mechaniki
DTC reguluje moment i strumień w bardziej bezpośredni sposób, umożliwiając bardzo szybką odpowiedź momentu w zastosowaniach z ostrymi transjentami i wymagającym zachowaniem momentu.
Punkt decyzyjny rzadko dotyczy jedynie szybkości reakcji; chodzi o to, jak system mechaniczny toleruje tę reakcję. Napęd, który może zmieniać moment prawie natychmiast, może również wzbudzać rezonans, jeśli rampy i limity są ustawione agresywnie. Najbardziej robustne konfiguracje traktują silnik, sprzęgło, skrzynię biegów i obciążenie jako jeden powiązany system, a następnie kształtują profile przyspieszenia i limity momentu, aby pasowały do tego, co mechanika może wchłonąć bez protestu.
Kategorie napędów napędzanych zastosowaniem
Napędy ogólnego przeznaczenia kładą nacisk na szeroką kompatybilność i kosztowne zestawy funkcji. Napędy o wysokiej wydajności zazwyczaj zapewniają ściślejszą kontrolę prądu, bogatsze opcje informacji zwrotnej i wejścia/wyjścia, wyższą pojemność przeciążeniową i bardziej zaawansowaną diagnostykę.
Informacja na temat selekcji, która wielokrotnie pojawia się w prawdziwych projektach, to to, że funkcje o wysokiej wydajności najbardziej opłacają się, gdy proces wymaga powtarzalności w obliczu zakłóceń, a nie tylko wtedy, gdy ocena silnika jest duża. Wiele dużych systemów wentylacyjnych działa płynnie na ogólnych napędach V/Hz, podczas gdy mniejsze systemy do kontroli napięcia, indeksowania lub ścisłej regulacji prędkości często korzystają z kontroli wektorowej i możliwości informacji zwrotnej.
Typowe separatory między klasami napędów w dyskusjach przetargowych:
• Zdolność przeciążeniowa i wyrafinowanie modelu termicznego
• Wsparcie dla urządzenia informacyjnego (enkoder/rezolwer)
• Głębia diagnostyczna i narzędzia śledzenia/nadzoru
• Elastyczność wejść/wyjść i funkcje integracyjne
Aplikacje wrzecionowe wymagają wysokiej zdolności do pracy z częstotliwością elektryczną, stabilnej regulacji prędkości i przemyślanej obsługi ogrzewania silnika przy podwyższonych RPM. Te napędy często kładą nacisk na szybkość przełączania i specjalistyczne funkcje ochrony silnika dostosowane do wrzecion.
W praktyce, wybór napędu ma tendencję do przebiegu gładziej, gdy respektuje system izolacji silnika wrzecionowego oraz strategię łożysk, zamiast skupiać się wąsko na maksymalnej prędkości. Gdy wrzeciona zawodzą wcześniej, przyczyną zazwyczaj jest zarządzanie temperaturą, smarowanie lub prądy łożyskowe, problemy, które mogą być frustrujące właśnie dlatego, że maskują się jako problemy z kontrolą.
Kontrole inżynieryjne związane z wrzecionami, które często zapobiegają niemiłym niespodziankom:
• Odpowiedniość izolacji silnika do szybkich krawędzi i wysokiej częstotliwości
• Podejście do łagodzenia prądów łożyskowych
• Limity temperaturowe w zakresie zamierzonej prędkości
• Założenia dotyczące chłodzenia i smarowania w rzeczywistych cyklach roboczych
Główne napędy jednostkowe są powszechne w lekkich środowiskach przemysłowych i komercyjnych, ale często są osłabiane, ponieważ prąd wejściowy rośnie dla tej samej mocy wyjściowej. Napęd trójfazowy zazwyczaj rozkłada prąd wejściowy bardziej równomiernie i skaluje się wygodniej w miarę wzrostu mocy.
Praktycznym szczegółem instalacji jest planowanie pojemności w górę. Usterki i przegrzane okablowanie często wynikają z niedoszacowania prądu wejściowego w obwodach jednofazowych, pomijania zachowania przy prądzie rozruchowym lub ignorowania, w jaki sposób harmoniczne wpływają na urządzenia ochronne.
Czynniki w górze, które zazwyczaj wpływają na wyniki instalacji:
• Dobór rozmiaru wyłącznika / bezpiecznika oraz wybór krzywej zadziałania
• Dobór wielkości przewodników i wzrost temperatury w rurze / tacce
• Zachowanie przy prądzie rozruchowym i wstępnym
• Wpływ harmonicznych na ochronę oraz urządzenia w górze
Terminologia funkcjonalna
W przypadku większości silników AC, użyteczny moment obrotowy w zakresie prędkości wynika z koordynacji napięcia z częstotliwością. Ta koordynacja znajduje się w centrum działania falownika, nawet gdy metoda kontroli jest skomplikowana. Podstawowe ograniczenie pozostaje takie samo: strumień silnika musi pozostawać w rozsądnych granicach, aby uniknąć słabego momentu po jednej stronie i przegrzewania po drugiej.
Uziemiony sposób interpretacji "VVVF" to przypomnienie o fizyce silnika, a nie etykieta marki. Podczas rozwiązywania problemów ze słabym momentem lub niespodziewanym nagrzewaniem, klarowność często przychodzi szybko, sprawdzając, czy zadane napięcie, zadana częstotliwość i limity prądu rzeczywiście odpowiadają punktowi pracy silnika i wymaganiom obciążenia.
CVCF opisuje regulowane źródła zasilania zaprojektowane do utrzymania napięcia i częstotliwości w stałym stanie, podobnie jak dostawa z utility. Ten model nie jest skierowany na zmianę prędkości silnika.
Gdy celem jest kontrola prędkości, CVCF ma tendencję do skierowywania myślenia w złym kierunku. Kontrola prędkości polega na zmiennej częstotliwości, a stabilne zachowanie momentu obrotowego zazwyczaj następuje, gdy napięcie jest zarządzane w zgodzie z częstotliwością w ramach ograniczeń silnika i zastosowania.
Tryby kontrolne dla niskonapięciowych falowników

Dlaczego tryb kontrolny nadal kształtuje wyniki w rzeczywistości w nowoczesnych niskonapięciowych napędach
Nowoczesne niskonapięciowe, ogólnodostępne falowniki (zazwyczaj klasy 380–690 VAC, od około 0.75 do 400 kW, z wyjściem 0–400 Hz) często wyglądają podobnie z punktu widzenia sprzętu, co może uśpić zespoły, oczekujące podobnego zachowania na maszynie. W terenie różnica ujawnia się szybko: tryb kontrolny w dużej mierze dyktuje, jak odczuwany jest napęd, gdy proces staje się chaotyczny, przy zimnych startach, skokach obciążenia, długich kablach, marginalnych silnikach oraz operatorach, którzy nie zajmują się dostrajaniem.
To, co strategia kontrolna wpływa, nie jest abstrakcyjne; staje się zestawem cech codziennych, które zauważają dział utrzymania i produkcji.
Zdolność momentu obrotowego przy niskich prędkościach; dokładność utrzymywania prędkości; reakcja na skoki obciążenia; hałas akustyczny; zniekształcenie harmoniczne; nagrzewanie silnika / stres termiczny; wrażliwość na dryf parametrów; wrażliwość na jakość uruchomienia.
W praktyce najlepszy tryb pracy to zazwyczaj taki, który spełnia wymagania dotyczące momentu i reakcji, pozostając stabilnym w miarę zmian temperatury, zmienności obciążenia i warunków pracy nieoptymalnych. Tryby, które działają dobrze tylko podczas prezentacji, mogą później powodować problemy, jeśli pojawią się stałe dostrajanie, skargi na hałas lub niestabilne zachowanie po wymianie silnika lub zmianach w systemie.
Generacja 1: SPWM z stałym V/Hz (Kontrola skalarna)
Kontrola skalarna utrzymuje w przybliżeniu stały stosunek V/Hz, aby strumień powietrza silnika pozostawał blisko pożądanym poziomie w miarę zmian częstotliwości. W przypadku sinusoidalnego PWM (SPWM) wdrożenie jest proste, profil kosztów jest przyjazny, a zachowanie zazwyczaj jest stabilne, gdy obciążenie jest łagodne, a użyteczny zakres prędkości nie jest ekstremalny.
Przy niskiej częstotliwości napięcie statora jest z natury małe. To sprawia, że spadek oporu statora (I·Rs) jest nieproporcjonalnie duży w porównaniu do zastosowanego napięcia, więc strumień spada poniżej zamierzonego poziomu. Rezultatem tego nie jest subtelny efekt: zdolność do momentu obrotowego maleje, silnik może się zatrzymać pod obciążeniem, a niektóre maszyny wytwarzają nieprzyjemne „szarpanie” lub oscylację, które operatorzy interpretują jako usterkę mechaniczną.
Dwa dodatkowe efekty często zwiększają frustrację w pobliżu zera prędkości: czas martwy falownika oraz spadki napięcia półprzewodników. Te straty dodatkowo zmniejszają efektywne napięcie na zaciskach silnika, co jest jednym z powodów, dla których dwa napędy o tej samej nazwie kW mogą zachowywać się wyraźnie inaczej podczas pełzania i pozycjonowania.
Instalacje, które trzymają się kontroli skalarnej, ale nadal chcą dość akceptowalnego zachowania przy niskich prędkościach, zazwyczaj nakładają kilka pragmatycznych korekt. Każda z nich może pomóc, a każda z nich może również stworzyć nowy tryb awarii, jeśli zostanie zbyt mocno naciśnięta.
• Wzmocnienie napięcia / kompensacja IR: dodaje dodatkowe napięcie przy niskiej częstotliwości, aby zrekompensować I·Rs; poprawia moment obrotowy przy rozruchu, ale agresywne ustawienia mogą doprowadzić do nadmiaru strumienia w silniku i zwiększyć ogrzewanie.
• Kompensacja poślizgu: dodaje częstotliwość w funkcji prądu obciążenia w celu zmniejszenia spadku prędkości silnika indukcyjnego; może nawinąć przenośniki i mieszalniki, jednak może wywołać wahania, gdy mechanika jest elastyczna lub sprzężenie zwrotne prądowe jest hałaśliwe.
• Krzywe V/f o wielu punktach: stosuje piecewise V/f, zamiast pojedynczej prostej; może sprawić, że jeden problematyczny zakres prędkości będzie działał, podczas gdy niewiele się zmienia w innych miejscach.
• Kształtowanie rampy i limity prądu: dostosowuje przyspieszenie/hamowanie i zachowanie ograniczające; często zapobiega przypadkowym wyłączeniom przy obciążeniach o wysokiej bezwładności bardziej niezawodnie niż jeden „magiczny” pokrętło kompensacji.
Gdy aplikacja wymaga silnego momentu obrotowego przy bardzo niskiej prędkości, częstych odwróceń lub precyzyjnego ograniczania momentu, kontrola skalarna zwykle przekształca się w cykl małych ulepszeń, które nigdy nie wydają się być zakończone. Maszyna może działać akceptowalnie po rozgrzaniu i stabilnym obciążeniu, a następnie tracić równowagę po zmianach temperatury, wymianach silników lub zmianach długości kabli, co jest dokładnie rodzajem zmienności, która sprawia, że technicy nie ufają systemowi, nawet jeśli na papierze wygląda to dobrze.
Generacja 2: SVPWM z ulepszoną kontrolą skalarna
PWM wektora przestrzennego (SVPWM) wykorzystuje wektory przełączania falownika bardziej efektywnie niż tradycyjny SPWM. Praktycznym rezultatem jest wyższe wykorzystanie magistrali DC i niższa zniekształcenie harmoniczne dla tego samego sprzętu, co zazwyczaj przekłada się na większe użyteczne napięcie podstawowe, płynniejszy prąd i często mniej hałas i ogrzewanie silnika.
Gdy SVPWM jest połączone z odpowiedzią prądową plus kompensacją napięcia/strumienia przy niskiej prędkości, wiele napędów skalarowych wydaje się mniej „miękkich” przy niskich prędkościach i bardziej przekonująco utrzymuje prędkość podczas umiarkowanych zmian obciążenia. Dla zespołów, które chcą lepszego zachowania bez zmiany kultury uruchamiania, ta stopniowa poprawa może być naprawdę atrakcyjna.
Nawet z SVPWM kontrola skalarna nie oddziela na dobre strumienia i momentu. Odpowiedź momentu jest wciąż pośredniczona przez pośrednią relację między napięciem, strumieniem i poślizgiem. Podczas dynamicznych wymagań, napęd często reaguje po tym, jak stan silnika już się zmienił, co wydaje się wolniejsze niż metody, które regulują moment bezpośrednio. Dlatego kontrola skalarna ulepszona przez SVPWM często jest postrzegana jako udoskonalenie, a nie zmiana skali dla wysokowydajnego ruchu.
SVPWM może przynieść mierzalne korzyści, nawet jeśli nic innego się nie zmienia, ale większe poprawy zazwyczaj pojawiają się dopiero po ponownym rozpatrzeniu podstawowych ustawień, przez które ludzie zrozumiale się śpieszą podczas uruchamiania.
Ustawienia, które często decydują o tym, czy SVPWM pojawia się w produkcji:
• Częstotliwość podstawowa
• Dane znamionowe silnika
• Minimalna częstotliwość
• Kompensacja napięcia/IR
• Limity prądowe.
Wiele skarg oznaczonych jako „niestabilność przy niskiej prędkości” wynika z konserwatywnych limitów prądowych lub błędnych parametrów silnika, a nie samej metody PWM, co może być pokornym odkryciem podczas rozwiązywania problemów.
Generacja 3: Kontrola wektorowa
Co dodaje FOC: Oddzielne pokrętła dla momentu i strumienia
Kontrola wektorowa przekształca mierzone prądy fazowe w obracającą się ramę odniesienia, aby prąd wytwarzający strumień i prąd wytwarzający moment mogły być regulowane niezależnie, w sposób przypominający kontrolę silnika DC. Na tym etapie kontrola silnika zmienia się z prostego zachowania dostosowawczego na bezpośrednią i precyzyjną kontrolę napędu. Efektem jest silniejszy moment obrotowy przy niskich prędkościach i szybsza reakcja, ponieważ moment staje się bezpośrednio zarządzaną zmienną, a nie skutkiem ubocznym poślizgu.
Bezczujnikowa vs. Kontrola z pętlą sprzężenia zwrotnego: różnica, którą odczuwasz na maszynie
• Sterowanie wektorem bezczujnikowym: szacuje pozycję/strumień wirnika na podstawie napięcia, prądu i modelu silnika; zmniejsza okablowanie i koszty; szeroko stosowane w przemyśle ogólnym; ma tendencję do problemów w pobliżu zera prędkości, ponieważ przeciw-EMF jest mały, a błędy modelu stają się nieproporcjonalnie wpływowe.
• Sterowanie wektorem w pętli zamkniętej: wykorzystuje enkoder lub resolver; zapewnia jednolity moment obrotowy przy zerowej prędkości i powtarzalną dynamikę; często wybierane do dźwigów, nawijarek, wind i precyzyjnego ruchu; może uczynić uruchamianie mniej nerwowym, gdy mechanika jest wrażliwa na pulsacje momentu.
Czułość parametrów: Cena, którą płacisz po uruchomieniu
Wydajność wektora w dużym stopniu zależy od parametrów silnika i estymacji strumienia. Kilka efektów może cicho przesuwać te parametry w trakcie normalnej pracy, a napęd będzie pewny tylko tak długo, jak jego model.
Źródła dryfu i niedopasowania, które często pojawiają się w produkcji.
• Dryf stałej czasowej wirnika
• Zmiana oporu statora w zależności od temperatury
• Nasycenie magnetyczne przy wyższym obciążeniu
• Impedancja długiego przewodu silnika i efekty EMI
Powszechny wzór objawów pojawia się, gdy system działa płynnie w zimnych i lekko obciążonych warunkach, ale później staje się mniej stabilny, głośniejszy lub niespójny w wysokiej temperaturze lub przy dużym obciążeniu. Takie sytuacje często prowadzą do braku zaufania do sterowania wektorowego lub do bardziej rygorystycznych praktyk strojenia i identyfikacji parametrów.
Praktyki strojenia, które zazwyczaj prowadzą do spokojniejszych instalacji
Stabilne instalacje wektorowe często dzielą kilka nawyków, które nie brzmią imponująco, ale zapobiegają długim sesjom debugowania później.
• Waliduj dane silnika w rzeczywistych warunkach okablowania: długość kabla, reaktory wyjściowe, uziemienie i układ instalacji wpływają na estymację i EMI w sposób, który rzadko odwzorowują ustawienia laboratoryjne.
• Używaj obrotowego autotune, gdy to możliwe: statyczne strojeni może być dobre dla wentylatorów i pomp, ale duży moment obrotowy przy niskiej prędkości często korzysta z obrotowej identyfikacji.
• Dopasuj pasmo kontrolne do mechaniki: zbyt agresywne pętle momentu mogą ekscytować sprzęgła, luz i rezonanse; nieco wolniejsze, ale dobrze tłumione zachowanie często daje lepszy przepływ i mniej fałszywych wyłączeń.
Praktyczna zasada wyboru trybu bez zbędnego myślenia
Jeśli proces jest wrażliwy na moment obrotowy przy niskiej prędkości lub oczekuje szybkiego powrotu z kroków obciążeniowych, sterowanie wektorowe często redukuje liczbę nieprzyjemnych niespodzianek później, mimo że praca przygotowawcza rośnie. Jeśli proces toleruje opadanie prędkości i rzadko działa w pobliżu zera, tryby skalarne często zapewniają bardziej stabilne codzienne zachowanie z mniejszą liczbą potencjalnych ustawień błędnych.
Generacja 4: DTC (Bezpośrednie Sterowanie Momentem)
Bezpośrednie sterowanie momentem estymuje strumień statora i moment w układzie odniesienia statora oraz wybiera stany przełączania falownika, aby utrzymać strumień i moment w granicach histerezy. Ponieważ unika niektórych zagnieżdżonych struktur pętli typowych dla implementacji FOC, może zapewnić bardzo szybki czas reakcji momentu i silne odrzucanie zakłóceń. W aplikacjach, w których operatorzy zauważają każdy spadek momentu jako defekt produktu lub problem w procesie, ta reakcja może być bardziej uspokajająca niż pięknie gładka fala.
Często obserwowane zalety.
• Szybka reakcja momentu podczas nagłych zmian obciążenia
• Silny moment przy niskiej prędkości, gdy estymacja pozostaje niezawodna
• Porównywalnie bezpośrednia struktura, która może działać stabilnie na wyższych poziomach mocy.
Koszty i ograniczenia, które wymagają planowania.
• Pulsacje momentu i zmienna częstotliwość przełączania
• Zachowanie histerezy może tworzyć hałas słyszalny i pulsacje momentu, które wyróżniają się w systemach o niskiej bezwładności lub precyzji.
Kompleksowość projektowania EMI i cieplnego: zmienna częstotliwość przełączania komplikuje projektowanie filtrów i może pogarszać akustykę silnika, jeśli nie jest odpowiednio zarządzana.
Zależność od jakości estymacji: słabości obserwatora przy zerowej prędkości mogą się pojawić, podobnie jak w przypadku sterowania wektorowego bez czujników, chociaż implementacje różnią się znacznie w zależności od dostawcy.
DTC często błyszczy, gdy przejścia momentu mają większe znaczenie niż ultra-gładki moment, i gdy parowanie napędu/silnika jest dostosowane i zintegrowane z tym oczekiwaniem. W przemyśle ciężkim, atrakcyjność często mniej koncentruje się na danych szczytowych, a bardziej na powrocie po zakłóceniach w sposób, który pozostaje spójny bez kruchych ustawień.
Generacja 5: Konwersja AC-AC w macierzy
Konwerter macierzowy konwertuje wejście AC bezpośrednio na wyjście AC bez dużego banku kondensatorów DC-link. To zmienia osobowość systemu: może poprawić współczynnik mocy wejściowej, zmniejszyć objętość komponentów magazynujących energię i pozwolić na inherentnie dwukierunkowy przepływ energii. Jednocześnie zmienia ograniczenia modulacji, metody ochrony i wymagania dotyczące commutacji, co zazwyczaj zwiększa obciążenie koordynacyjne między kontrolą a sprzętem zasilania.
Konwersja macierzowa wymaga starannie zsynchronizowanej komutacji, aby uniknąć zwarcia faz wejściowych lub przerywania indukcyjnych ścieżek prądowych. Osiągnięcie stabilnego zachowania bezczujnikowego i silnego momentu obrotowego przy niskich prędkościach zazwyczaj wymaga wysokiej wierności obserwatorów (strumień, moment obrotowy, czasami prędkość), szybkiego obliczania w czasie rzeczywistym oraz zaawansowanej modulacji, która może łączyć PWM z logiką decyzyjną przypominającą histerezę. Kiedy wszystko jest dobrze zrobione, reakcja momentu obrotowego może osiągnąć zachowanie rzędu milisekund, ale margines komfortu inżynieryjnego jest często węższy niż w przypadku konwencjonalnych napędów falowników z zasobnika napięcia (VSI), co może sprawić, że zespoły będą ostrożne, chyba że korzyści wyraźnie przewyższają dodaną złożoność.
• Ograniczenia współczynnika transferu napięcia: praktyczne maksymalne napięcie wyjściowe jest ograniczone w stosunku do wejścia, co może zmniejszyć margines momentu obrotowego przy wysokich prędkościach, chyba że system jest zaprojektowany z myślą o tym.
• EMC i filtracja: usunięcie mostka DC przenosi ciężar filtracji i może skomplikować zgodność w elektronicznie hałaśliwych środowiskach.
• Kompromisy w zakresie niezawodności: usunięcie kondensatorów elektrolitycznych może poprawić żywotność w niektórych profilach pracy, ale przetwornik wprowadza bardziej złożone wymagania dotyczące przełączania i ochrony, które przesuwają miejsca, w których mogą wystąpić awarie.
Przetworniki macierzowe są zazwyczaj uzasadnione, gdy dominują dwukierunkowy przepływ energii, kompaktowość lub kwestie żywotności kondensatorów, i gdy miejsce może wspierać inżynieryjną i serwisową złożoność, która za tym idzie. Trudniej jest je uzasadnić, gdy priorytety skłaniają się ku szybkiej wdrożeniu, szerokiej znajomości serwisowej lub wysokiej tolerancji na niepewność parametrów i dane dotyczące „wystarczająco dobrego” silnika.
W ciągu tych pokoleń wzór pozostaje spójny: wydajność poprawia się, gdy moment obrotowy i strumień przechodzą z zachowań emergentnych do jasno regulowanych zmiennych. Handel polega na tym, że każdy krok w górę ma tendencję do polegania bardziej na modelach, jakości pomiarów, dyscyplinach uruchamiania i kompatybilności mechanicznej. Napęd teoretycznie mocniejszy może nadal nie dostarczać wyników, gdy dane dotyczące silnika są błędne, gdy system mechaniczny wzmacnia szumy lub gdy operacja spędza czas w pobliżu słabego obszaru obserwatora.
Cechy falownika VFD
Falowniki VFD zazwyczaj zdobywają swoją reputację w zmierzonych zachowaniach, a nie w języku broszur. To, co zwykle rozwiązuje debatę, często po kilku długich porankach uruchamiania przed panelem, to jak konsekwentnie napęd zmienia reakcję silnika podczas uruchamiania, zmian prędkości i pracy przy częściowym obciążeniu. To są momenty, kiedy tradycyjne podejścia często poświęcają energię, gładkość lub żywotność sprzętu.
W codziennej pracy inżynieryjnej wyniki są bardziej powtarzalne, gdy wydajność elektryczna i oczekiwania procesowe są traktowane jako jeden wątek projektu (ograniczenia systemu energetycznego, ograniczenia cieplne silnika i dynamika procesów powiązane ze sobą), a nie jako dwie równoległe listy kontrolne, które spotykają się tylko przy uruchamianiu.
Łagodny start i niższe napięcie/obciążenie mechaniczne
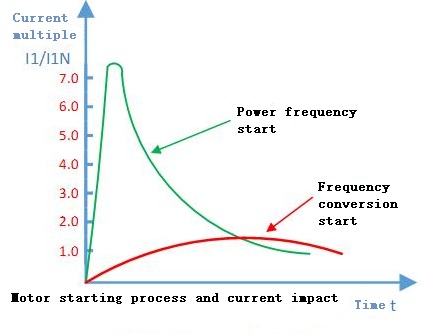
Definiującą cechą falownika VFD jest kontrolowane przyspieszenie, realizowane poprzez koordynację napięcia i częstotliwości podczas rampy. Przy uruchomieniu na pełnym napięciu, prąd rozruchowy zazwyczaj wynosi ~5–7× nominalnego prądu, a negatywne strony szybko się ujawniają.
Typowe efekty uboczne przy uruchomieniu na pełnym napięciu:
• Spadek napięcia
• Niepożądane wyłączenia
• Zużycie styków
• Wstrząsy sprzęgła/pasa/ przekładni.
Dzięki rampie VFD, prąd rozruchowy często pozostaje bliżej ~1.2–1.5× nominalnego, chociaż rzeczywiste wartości nadal zależą od profilu obciążenia, czasu przyspieszania i wymagań momentu obrotowego. Gdy ten szczyt prądu jest unikany, osoby na hali zazwyczaj odczuwają to jeszcze przed dokonaniem obliczeń: mniej zaskoczonych spojrzeń na statusie wyłącznika, mniej ponownych uruchomień w trakcie zmiany, i spokojniejsza szafa sterownicza podczas uruchomień w poniedziałkowe poranki.
Również sprzęt upstream korzysta z łagodniejszego profilu elektrycznego. Mniejsze prądy rozruchowe zmniejszają szczytowe obciążenie transformatorów, generatorów i wspólnych zasilaczy, a także zmniejszają szansę, że inne wrażliwe obciążenia na tym samym zasilaniu doświadczą krótkotrwałej niedowolności napięcia. W przypadku rozwiązywania problemów w terenie, to jedna z tych zmian, które cicho redukują frustrację: „losowe” wyłączenia przestają być losowe, a konserwacja przestaje gonić za intermittent symptoms, które miały swoje źródło w twardych uruchomieniach.
Ponieważ moment obrotowy można kontrolować podczas wzrostu prędkości, napęd może uniknąć nagłego skoku momentu obrotowego, który często występuje przy uruchomieniach sieciowych. To objawia się jako bardziej przewidywalne zachowanie mechaniczne, zwłaszcza w maszynach, które już nauczyły zespół trochę pokory.
Typowe wyniki mechaniczne, gdy rampa momentu obrotowego jest dobrze ukształtowana: dłuższa żywotność pasa; mniej awarii sprzęgła; zmniejszone drgania skrętne w pociągach obrotowych.
W wielu zakładach praktyczna różnica nie polega na tym, czy obciążenie uruchamia się raz, ale na tym, czy uruchamia się w ten sam sposób za każdym razem. Obciążenia z wysokim współczynnikiem tarcia odrywającego, lepkim produktem lub zimnymi łożyskami często lepiej reagują, gdy nachylenie jest dostosowane z intencją, a nie zgadywane. Stabilne i przewidywalne zachowanie w trakcie uruchamiania zwiększa zaufanie podczas normalnej pracy.
Nachylenie przyspieszenia, które jest zbyt agresywne, może nadal powodować szczyty prądu i wstrząsy mechaniczne. Zbyt wolne nachylenie może doprowadzić do przegrzania silnika przy niskiej prędkości, gdy chłodzenie wentylatorem jest słabe lub gdy zapotrzebowanie na moment obrotowy jest podwyższone.
Podejście do uruchamiania, które zazwyczaj wydaje się bardziej stabilne (i jest łatwiejsze do obrony później), polega na rozpoczęciu od konserwatywnego przyspieszenia, a następnie skróceniu go tylko wtedy, gdy proces naprawdę korzysta, obserwując mały zestaw sygnałów, które rzadko kłamią:
Sygnały do śledzenia podczas dostosowywania nachylenia:
• Prąd wyjściowy napędu
• Temperatura silnika (lub model termiczny)
• Zmiany wibracji
• Spójność powtarzanych uruchomień
Szeroki zakres, płynna kontrola prędkości przez zmianę częstotliwości
Inną cechą definiującą jest kontrola prędkości bez mechanicznych przeróbek. Zamiast zmieniać pary biegunów lub dodawać etapy przekładniowe, VFD zmienia częstotliwość zasilania. W przypadku silnika indukcyjnego, prędkość synchroniczna i prędkość wirnika są zazwyczaj wyrażane jako:
n₀ = 60f / P
n = 60f(1 − S) / P
Gdzie f to częstotliwość, P to liczba biegunów, a S to poślizg. Zmienność f pozwala na płynne przejścia prędkości, jednocześnie utrzymując poślizg w zakresie, który kontroler może zarządzać. W praktyce przekłada się to na stabilniejsze zachowanie procesu: przenośniki mogą dopasowywać się do szybkości w górę/w dół, pompy mogą nadążać za zapotrzebowaniem, a wentylatory mogą utrzymywać zadane wartości ciśnienia bez cykli zatrzymywania i uruchamiania, które obciążają zarówno sprzęt, jak i cierpliwość.
Punkt, który czasami umyka uwadze, aż do momentu, gdy odpady lub przeróbki stają się bolesne oczywiste, to fakt, że płynna kontrola prędkości nie jest tylko kwestią wygody. Zmniejszona zmienność procesu często obniża interwencje operatorów i może zredukować straty jakości, które nigdy nie pojawiają się na liczniku energii.
Kontrola VFD przynosi największe korzyści, gdy proces spędza rzeczywisty czas z dala od prędkości znamionowej. Zamiast działać z pełną prędkością i odrzucać nadmiar przez tłumienie lub dampowanie, system może działać bliżej tego, co obciążenie faktycznie wymaga w danym momencie. To zwykle poprawia stabilność i zmniejsza zużycie elementów sterujących, które w przeciwnym razie spędzałyby swoje życie walcząc z maszyną.
Komponenty, które często widzą mniejsze zużycie, gdy prędkość jest stosowana do kontroli:
• Zawory regulacyjne
• Tłumiki wejściowe
• Ścieżki obejściowe
• Hamulce mechaniczne używane do utrzymywania tempa
Poślizg S to więcej niż zmienna w równaniu; odzwierciedla, jak silnik rozwija moment obrotowy pod obciążeniem. Kontrola napędu zarządza poślizgiem pośrednio, koordynując napięcie i częstotliwość, aby silnik mógł wytwarzać moment obrotowy bez przeciągania nadmiernego prądu.
W trakcie uruchamiania pomocne jest spojrzenie na zapotrzebowanie na moment obrotowy w całym zakresie prędkości, a nie tylko w komfortowym punkcie średniej prędkości. Ustawienia, które wydają się dobre przy średniej prędkości, mogą stać się rozczarowujące w pobliżu szczytów momentu obrotowego przy niskiej prędkości, a to rozczarowanie ma tendencję do ujawniania się w najmniej wygodnym czasie, podczas zimnych uruchomień, dużych partii lub po zakłóceniu procesu.
Wysoki potencjał oszczędności energii w przypadku obciążeń o zmiennym momencie obrotowym
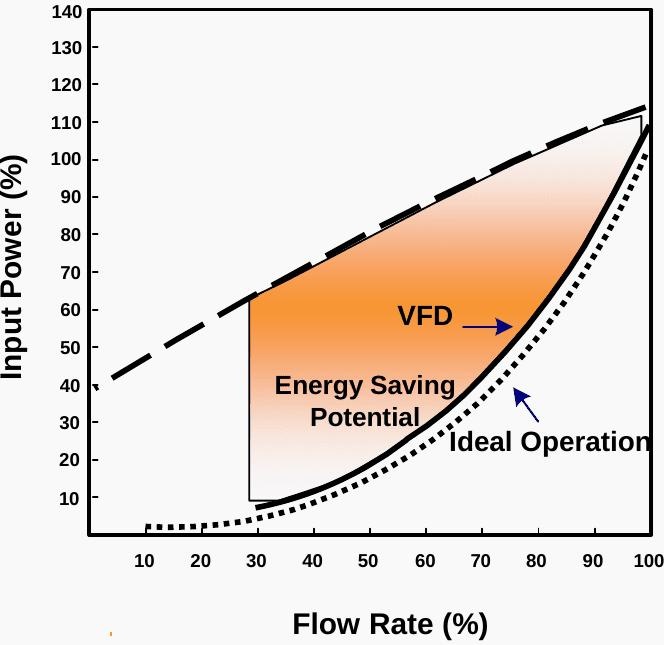
Redukcja energii jest często najsilniejsza w przypadku obciążeń o zmiennym momencie obrotowym, takich jak wentylatory i pompy odśrodkowe. Prawa podobieństwa wyjaśniają kształt oszczędności:
Relacje podobieństwa:
• Przepływ ∝ Prędkość
• Ciśnienie/Wysokość ∝ Prędkość²
• Moc ∝ Prędkość³
Ponieważ moc rośnie w sześcianie prędkości, nawet umiarkowane redukcje prędkości mogą prowadzić do dużych redukcji mocy. Dlatego zawory regulacyjne i tłumiki wejściowe często są spóźnione w redukcji prędkości, gdy zapotrzebowanie się zmienia: tłumienie rozprasza energię w postaci strat ciśnienia, podczas gdy kontrola prędkości zmniejsza energię, którą system potrzebuje wytworzyć w pierwszej kolejności.
W środowiskach operacyjnych różnica jest zazwyczaj widoczna w więcej niż jednym miejscu, co jest satysfakcjonujące w bardzo praktyczny sposób, ponieważ wzmacnia to przekonanie, że strategia kontroli działa tak, jak przewidywał model:
Wspólne oznaki operacyjne zmniejszonego zapotrzebowania przy niższej prędkości:
• Niższe zużycie kW
• Cichsza praca
• Mniej ciepła w systemie
• Mniej wezwań do serwisu zaworów i tłumików
Z profesjonalnego punktu widzenia, oszczędności, które przetrwają próbę czasu, zazwyczaj pochodzą z traktowania VFD jako części strategii sterowania (punktów zadanych, ograniczeń i informacji zwrotnej), a nie jako manualnego pokrętła prędkości, które dryfuje wraz z nawykami i preferencjami zmian. Gdy napęd jest zintegrowany z wyraźną logiką, kontrolą ciśnienia, przepływu lub temperatury z zabezpieczeniami, wyniki zazwyczaj pozostają stabilne, nawet gdy operatorzy się zmieniają.
Wiele systemów działa na częściowym obciążeniu przez większość godzin pracy. VFD dostosowuje moc wejściową silnika do rzeczywistego zapotrzebowania, zamiast wymuszać pracę na pełnej prędkości i „zarządzać” tymi stratami. Często prowadzi to do zmniejszenia zużycia energii, a także łagodzi obciążenia mechaniczne, ponieważ system pracuje z mniejszą turbulencją, mniejszymi stratami spowodowanymi zwężeniem i mniejszymi szybko zmieniającymi się oscylacjami kontrolnymi, które irytują zarówno sprzęt, jak i operatorów.
Prostym sposobem na walidację oszczędności jest porównanie rzeczywistej mocy (kW) w ustabilizowanych punktach pracy przed i po wdrożeniu kontroli prędkości, zamiast opierać się tylko na założeniach katalogowych. Ten nawyk oparty na pomiarach pomaga zapobiegać nieprzyjemnym rozmowom później, zwłaszcza kiedy krzywe systemowe, minimalne ograniczenia przepływu i strojenie kontrolne zmieniają wyniki.
Czynniki terenowe, które powszechnie zmieniają wyniki w porównaniu do szacunków teoretycznych:
• Kształt krzywej systemu
• Minimalne ograniczenia przepływu i wysokości
• Miejsce umieszczenia czujników
• Strojenie PID
• Zachowanie omijania lub recyrkulacji
Charakterystyka VFD
Kluczowe cechy VFD można podsumować w trzy tematy ukierunkowane na wyniki, sformułowane w takim języku, jakim posługują się ludzie, kiedy decydują, czy instalacja „działała”:
(1) Łagodniejsze uruchomienia z niższym prądem rozruchowym i mniejszym stresem elektrycznym/ mechanicznym.
(2) Płynna kontrola prędkości w szerokim zakresie dzięki zmiennej częstotliwości z kontrolowanym zachowaniem poślizgu.
(3) Znaczne zmniejszenie zużycia energii w przypadku obciążników o zmiennym momencie obrotowym, ponieważ moc spada szybko wraz ze spadkiem prędkości.
Kiedy te tematy stosuje się z praktycznym strojeniem i logicznymi kontrolami świadomymi procesów, wyniki zazwyczaj są spójne w różnych zmianach i porach roku, co często jest tym, czego zespoły rzeczywiście chcą: mniej niespodzianek, mniej sytuacji zatrzymujących linię oraz wydajność, która pozostaje stabilna po odejściu ekipy montażowej.
Wnioski
Wydajność VFD zależy od znacznie więcej niż tylko zmiany prędkości silnika. Stabilna praca wymaga starannej koordynacji częstotliwości, napięcia, regulacji prądu, parametrów silnika, warunków termicznych i zachowania obciążenia. Różne strategie kontroli balansują reakcję momentu obrotowego, efektywność, stabilność i wydajność dynamiczną na podstawie potrzeb aplikacji. W miarę jak systemy przemysłowe wymagają wyższej efektywności, precyzji i niezawodności, technologia VFD nadal ewoluuje dzięki ulepszonym metodom kontroli, systemom ochrony i projektom elektroniki mocy, które wspierają nowoczesne aplikacje napędzane silnikami.
Najczęściej zadawane pytania [FAQ]
1. Dlaczego VFD reguluje napięcie razem z częstotliwością, zamiast zmieniać tylko częstotliwość?
VFD dostosowuje zarówno napięcie, jak i częstotliwość, aby utrzymać strumień magnetyczny silnika w stabilnym zakresie roboczym. Jeśli częstotliwość spadnie bez odpowiedniej regulacji napięcia, strumień osłabnie, a zdolność momentu obrotowego spadnie gwałtownie, zwłaszcza przy niskiej prędkości. Jeśli napięcie pozostaje zbyt wysokie w porównaniu do częstotliwości roboczej, silnik może pobierać nadmierny prąd magnetyzujący, zwiększając ciepło i obciążając system izolacji. Koordynacja napięcia i częstotliwości pozwala napędowi utrzymać użyteczny moment obrotowy, stabilne zachowanie prądu i przewidywalną wydajność cieplną w zmieniających się warunkach obciążenia.
2. Dlaczego wiele problemów z VFD związanych z silnikami w rzeczywistości pochodzi z boku zasilania napędu?
Wiele problemów przypisywanych silnikom w rzeczywistości jest spowodowanych tym, jak etap prostownika współdziała z zasilaniem elektrycznym. Standardowe prostowniki diodowe pobierają prąd nienaświetlony, co wprowadza harmoniczne i może destabilizować słabe systemy zasilania o wysokiej impedancji źródła. Objawy, takie jak przypadkowe wyłączenia, ogrzewanie transformatora, niestabilność napięcia lub przerywane usterki, często pojawiają się z relacji między napędem a przychodzącym systemem energetycznym, a nie z samego silnika. Składniki po stronie wejściowej, takie jak reaktory linii, dławiki łącza DC i filtry EMI, są często dodawane w celu stabilizacji tych interakcji.
3. Dlaczego kondensatory łącza DC uważane są za jedne z najbardziej obciążonych komponentów wewnątrz VFD?
Kondensatory łącza DC pochłaniają prąd tętnienia, stabilizują napięcie magistrali i tymczasowo magazynują energię podczas szybkich zmian obciążenia. Z czasem ciągły stres termiczny i ekspozycja na prąd tętnienia stopniowo pogarszają wydajność pojemności. Napęd może kontynuować pracę, nawet jeśli pojemność się pogarsza, co może sprawić, że problem będzie trudny do zauważenia na początku. W końcu napęd staje się bardziej wrażliwy na spadki napięcia, zjawiska regeneracyjne i przejściowe zmiany obciążenia, często prowadząc do niewytłumaczonych wyłączeń lub niestabilnego zachowania, zanim nastąpi całkowita awaria kondensatora.
4. Dlaczego zwiększenie częstotliwości nośnej PWM poprawia akustykę silnika, ale zwiększa stres termiczny wewnątrz napędu?
Wyższa częstotliwość nośna PWM produkuje gładszy prąd silnika i redukuje hałas słyszalny, przesuwając harmoniczne przełączania powyżej najbardziej zauważalnego zakresu słyszenia. Jednak każde zdarzenie przełączania generuje straty wewnątrz IGBT i elektroniki mocy. W miarę wzrostu częstotliwości przełączania straty inwertera i wewnętrzne nagrzewanie znacznie się zwiększają. Tworzy to praktyczny kompromis inżynieryjny między cichszym działaniem silnika a utrzymywaniem akceptowalnej rezerwy termicznej wewnątrz VFD. W wielu instalacjach strojenie częstotliwości nośnej ma bezpośredni wpływ na długoterminową niezawodność i wymagania dotyczące chłodzenia obudowy.
5. Dlaczego obciążenia regeneracyjne często wywołują usterki nadnapięcia DC w czasie zwalniania?
Gdy silnik zwalnia lub jest napędzany przez samo obciążenie, zaczyna działać jak generator i zwraca energię do szyny DC. Jeśli regenerowana energia wchodzi do szyny szybciej, niż może być rozpraszana lub odsyłana do sieci, napięcie DC szybko rośnie i uruchamia ochronę przed nadnapięciem. To zachowanie jest silnie wpływane przez bezwładność obciążenia i agresywność zwalniania. Wiele problemów z nadnapięciem jest rozwiązywanych przez wydłużenie ramp zwalniania lub odpowiednie dopasowanie rezystorów hamujących i sprzętu regeneracyjnego do rzeczywistej energii mechanicznej zgromadzonej w systemie.
6. Dlaczego kontrola wektorowa zazwyczaj przewyższa kontrolę skalarnego V/Hz przy niskich prędkościach i podczas zmian obciążenia?
Kontrola skalarna V/Hz reguluje zachowanie silnika pośrednio, utrzymując przybliżony stosunek napięcia do częstotliwości, co dobrze sprawdza się w przypadku przewidywalnych obciążeń, takich jak wentylatory i pompy. Kontrola wektorowa, a szczególnie kontrola orientacji pola (FOC), reguluje osobno komponenty prądu produkującego moment obrotowy i komponenty prądu produkującego strumień. Pozwala to napędowi znacznie szybciej reagować na zmiany obciążenia i utrzymywać silniejszy moment obrotowy, nawet blisko zerowej prędkości. Różnica staje się szczególnie zauważalna w zastosowaniach związanych z szybkim przyspieszaniem, dużym momentem startowym lub wrażliwymi wymaganiami dotyczącymi regulacji prędkości.
7. Dlaczego napędy sterowane wektorowo mogą stać się niestabilne po zmianach temperatury lub wymianie silnika?
Kontrola wektorowa w dużej mierze zależy od dokładnej estymacji parametrów silnika. Opór rotora, opór statora, zachowanie nasycenia magnetycznego i impedancja kabli mogą się zmieniać w rzeczywistych warunkach eksploatacji. Zmiany temperatury i zamiany silnika często zmieniają te parametry na tyle, aby obniżyć dokładność estymacji, szczególnie przy niskiej prędkości, gdzie modele obserwacyjne stają się bardziej czułe. Systemy, które początkowo działają płynnie, mogą później rozwinąć hałas, niestabilną reakcję momentu obrotowego lub niespójną regulację prędkości, jeśli model silnika nie odzwierciedla już rzeczywistego zachowania elektrycznego.
8. Dlaczego autostrojenie uważane jest za jeden z najważniejszych kroków podczas uruchamiania VFD?
Autostrojenie dostosowuje model sterowania napędu do rzeczywistych charakterystyk elektrycznych silnika, zamiast polegać tylko na wartościach z tabliczki znamionowej. To poprawia regulację prądu, reakcję momentu obrotowego, estymację poślizgu i zachowanie przy niskich prędkościach. W wielu instalacjach autostrojenie to punkt, w którym system przechodzi z działania na poziomie funkcjonowania do płynnego i przewidywalnego działania. Rotacyjne procedury autostrojenia są szczególnie cenne w aplikacjach wymagających silnego momentu obrotowego przy niskich prędkościach lub precyzyjnej reakcji przejściowej, ponieważ uchwytują zachowanie silnika w rzeczywistych warunkach eksploatacyjnych.
9. Dlaczego VFD znacząco zmniejszają zużycie energii na pompach i wentylatorach w porównaniu do metod throttlingu?
W przypadku pomp i wentylatorów odśrodkowych pobór mocy podlega prawom afinitetu, gdzie moc zmienia się w przybliżeniu z sześcianem prędkości. Oznacza to, że nawet umiarkowane redukcje prędkości mogą przynieść znaczne oszczędności energii. Tradycyjne metody throttlingu zmuszają silnik do pracy z pełną prędkością, jednocześnie mechanicznie ograniczając przepływ, co marnuje energię w postaci strat ciśnienia. VFD zamiast tego bezpośrednio redukuje prędkość silnika, tak aby system produkował jedynie wymagany przepływ lub ciśnienie, zmniejszając zapotrzebowanie na moc u źródła, a nie rozpraszając nadmiar energii.
10. Dlaczego szybkie przełączające nowoczesne technologie VFD zwiększają obawy dotyczące EMI i prądów łożyskowych?
Nowoczesne napędy PWM, szczególnie te używające urządzeń przełączających SiC lub GaN, generują ekstremalnie szybkie przejścia napięcia z wysokim dV/dt. Te szybkie krawędzie mogą tworzyć napięcia w trybie wspólnym, zakłócenia elektromagnetyczne i prądy marnotrawne, które przechodzą przez łożyska silnika. Jeśli praktyki uziemienia, osłony kabli, filtracji i wiązania są kiepsko wykonane, wynikiem mogą być przedwczesne zużycie łożysk, hałaśliwe czujniki, niestabilność komunikacji lub stres izolacji. W instalacjach o wysokich parametrach jakość okablowania i uziemienia staje się często równie ważna jak sam algorytm sterowania.
Powiązany blog
-
Ile zer na milion, miliard, bilion?
![Ile zer na milion, miliard, bilion?]()
2024/07/29
Million reprezentuje 106, łatwo chwytana liczba w porównaniu do przedmiotów codziennych lub rocznych pensji. Miliard, równoważny 109, zaczyna roz... -
IRLZ44N MOSFET Arkusz, obwód, równoważny, pinout
![IRLZ44N MOSFET Arkusz, obwód, równoważny, pinout]()
2024/08/28
IRLZ44N to szeroko stosowany Mosfet Power N-Kannel.Znany z doskonałych możliwości przełączania, jest bardzo odpowiedni do wielu zastosowań, szcz... -
Temperatura akumulatora zbyt niska, ładowanie zatrzymało się.Jak to naprawić?
![Temperatura akumulatora zbyt niska, ładowanie zatrzymało się.Jak to naprawić?]()
2024/10/6
Problemy z ładowaniem baterii telefonu komórkowego są powszechne, ale można je skutecznie zarządzać.Temperatura odgrywa dużą rolę w wydajnoś... -
BC547 Tranzystor Kompleksowy przewodnik
![BC547 Tranzystor Kompleksowy przewodnik]()
2024/07/4
Tranzystor BC547 jest powszechnie stosowany w różnych zastosowaniach elektronicznych, od podstawowych wzmacniaczy sygnałowych po złożone obwody o... -
Kompleksowy przewodnik po SCR (prostownik kontrolowany krzem)
![Kompleksowy przewodnik po SCR (prostownik kontrolowany krzem)]()
2024/04/22
Kontroli prostownicy (SCR) lub Thyristors odgrywają kluczową rolę w technologii elektroniki energetycznej ze względu na ich wydajność i niezawod... -
LR621, SR621SW, 364, AG1 Equivivalents i zamienniki
![LR621, SR621SW, 364, AG1 Equivivalents i zamienniki]()
2024/07/15
Baterie przycisków LR621 i SR621SW są powszechne w kompaktowych urządzeniach elektronicznych, takich jak zegarki, małe zabawki, kalkulatory i zdal... -
Podstawy obwodów OP-AMP
![Podstawy obwodów OP-AMP]()
2023/12/28
W skomplikowanym świecie elektroniki podróż do jej tajemnic niezmiennie prowadzi nas do kalejdoskopu komponentów obwodów, zarówno wykwintnych, j... -
Kompletny przewodnik po multiplekserach i ich rola w systemach cyfrowych
![Kompletny przewodnik po multiplekserach i ich rola w systemach cyfrowych]()
2025/09/20
Multipleksery są komponentami w systemach cyfrowych, zaprojektowanych do kierowania wieloma sygnałami wejściowymi do pojedynczej linii wyjściowej ... -
Porównanie różnic i zastosowań NMOS i PMOS
![Porównanie różnic i zastosowań NMOS i PMOS]()
2024/11/15
Zrozumienie różnic między tranzystorami NMOS i PMO jest ważne w projektowaniu wydajnych obwodów.NMOS (NMOS-semiconductor) i PMOS (typ p-tlenku-tl... -
CR2450 vs CR2032 Porównanie: Wszystko, co musisz wiedzieć
![CR2450 vs CR2032 Porównanie: Wszystko, co musisz wiedzieć]()
2025/09/15
Baterie guzików, takie jak CR2450 i CR2032, zasilają wiele codziennych elektroniki, od zegarków i pilotów po urządzenia medyczne i przemysłowe.C...










Gorące części
- K4S511632B-TC75
- M52067FP
- RC82573L
- ACPM-9007-BLK
- ICS950812CGLF
- M28W800CB70ZB6
- IDT71V321L55PFI
- 08051A270FAT2A
- CL05B473KO5NNND
- HD6432635UA81FJ
- LX62UL256SC-45
- UVR1H470MED1TD
- MC14495P1
- AD5258BRMZ10
- CM200YE4-12F
- RN73C1E10K7BTDF
- MT89L80AP1
- XC9536PC44AEM-15C0001
- DMN2046U-7
- CXB1443R-T4
- NT7167FG-00033
- CY7C68013A-128AXC
- SN74LVC2244ADGVR
- 74ACT843SPC
- RT1206DRD071KL
- NC7SZ332L6X
- LC1117CLTR18
- A42MX16-TQG176
- HY5DU283222AF-28
- M82520-14
- VI-2W0-CW/F1
- PI5A126U
- 06033A100JAT4A
- TAJT105M020RNJ
- XZFABBA10A
- LM1117IMP-5.0/NOPB
- ADE7878AACPZ-RL
- TLV320AIC24KIPFB
- AM3352BZCEA60
- STD4NK50ZT4
- T495D226M020ZTE200
- ICS1562BMLF
- K3RG4G40MM-MGCJT00E
- LCMX02-7000HC-4FG484I
- MC74HC4052AG
- UPD65029GD-083-5BB
- LM66100DCK
- SN27546YPHR.B1
- GLS85LS1002P-S-I-FZJE-TT095
- TPS826711SIP